ラインセンサカメラとは
ラインセンサカメラ (英語:line sensor camera) は、ライン状に対象物を撮像し、1枚の画像に合成するカメラです。
よく比較されるエリアセンサカメラでは、視野全体を1度に撮像します。それに対して、ラインセンサカメラは、1列のラインセンサに対して対象物を直角方向に移動させながら、あるいはカメラを移動させながら連続的に撮影することで、平面的な画像を取得できます。
横長の画像を取得する場合、ラインセンサカメラであればピクセル単位で生じるわずかな変化もとらえることが可能です。
ラインセンサカメラの使用用途
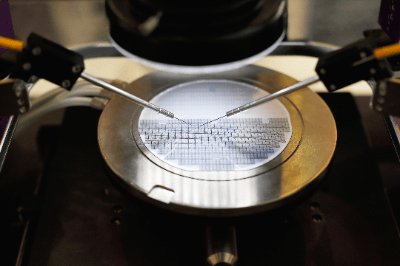
ラインセンサカメラは、道路や外壁をはじめとした社会インフラの検査から、不織布・歯車・半導体部品などの工業的な検査、美術品の解析、今まで目視検査を行っていた果実の選別など、幅広い目的で使用されます。
ラインセンサカメラが適している対象物は、サイズが大きいもの・高精度な分解能が必要なもの・連続した長いもの・立体の外観などです。
例えば、サイズが大きい対象物を撮影する場合、エリアセンサであれば分割して撮影する方法もありますが、複数の画像をつなぎ合わせなければなりません。一方、ラインセンサを用いると、1枚の画像として撮影できるため、画像をつなぐ作業は不要です。
ラインセンサカメラの原理
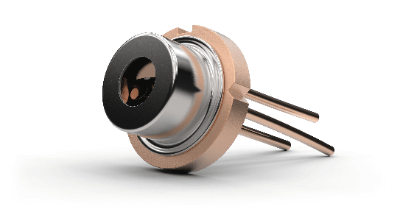
ラインセンサカメラは、通常のカメラと同様に、レンズから入った光をCCD・CMOSなどの撮造素子上で結像させることで電子的な信号に変換し、画像として出力します。
1列のラインセンサで構成される撮像素子に対して、垂直方向に被写体を移動させて連続的に撮影します。そして、多くの画像を合成して、連続した画像を取得します。ラインセンサカメラはモノクロの画像を取得できるモデルと、カラーまたは不可視光線の画像を取得できるモデルに大別されます。
カラー画像が取得できるモデルでは、ラインセンサの配列が1~3列程度であり、多層構造になっています。 これは1つのセンサから入手できる色情報が1つであるためです。3列のカラーセンサーでは、特定の1ピクセルを青・緑・赤の色情報が取得できる3つの撮像素子で撮影します。
一方、1列のカラーセンサーでは、特定の1ピクセルを1つの撮像素子で撮影するので、単一の色情報のみを取得します。そして、周囲の色情報から特定の1ピクセルの色情報を推定するので、色の正確度が3列のカラーセンサーより劣ります。
ラインセンサカメラの選び方
ラインセンサカメラの選定で重要なことは、扱う対象システムの分解能・露光制御・高速対応・感度などトータルで判断することです。
1. 露光制御
旧来のラインセンサカメラは露光制御がなく、速度変動に対して手動で光源の明るさを変化させています。電子シャッターを使うことにより、速度の変化があっても、露光時間を自動で変えて同じ明るさで撮像できます。
2. 高速対応
データ処理能力を表わすスループットで判断します。現在では最高速度レベルのカメラが市販されています。
3. 感度
従来のラインセンサカメラは、1ラインスキャン分の露光タイムしか取れないため、強めの光源を要します。したがって、センサ自体は開口率100%の効率の良いものを使用しています。また、タイムディレイインテグレーション技術を使った数十倍以上も感度を向上させたカメラもあり、光量が上げられない場所や高速スキャンに適しています。
4. シェーディング補正
最新カメラでは、ピクセル内のわずかな感度の差異をカメラでリアルタイムに補正する機能があります。このツールを使って、照明ムラによる幅方向の光量変化補正であるシェーディング補正が可能です。
ラインセンサカメラのその他情報
ラインスキャンカメラのメーカー
ラインセンサカメラは、長尺物の検査や立体物の外観検査など特定の分野で使われます。したがって、エリアセンサカメラと比較すると、市場が限定的と言えます。ラインセンサカメラの市場規模は、エリアセンサカメラの40%ぐらいですが、急速に拡大しています。
ラインセンサカメラのメーカーは発展途上の製品であるため、非常に多くあります。従業員が多い会社では、株式会社キーエンス・浜松ホトニクス株式会社などです。さらに、コアテック株式会社・株式会社アバールデータ・株式会社ジェイエイアイコーポレーションなど多くあります。
参考文献
https://www.keyence.co.jp/landing/req/vision/cv-x_1097_03.jsp
https://www.jfe-steel.co.jp/research/giho/015/pdf/015-16.pdf