制御・計測・センシング
駆動・機械要素・電子制御部品
産業別カテゴリ
電源・エネルギー・熱処理機器
安全・保護・環境対策
材料・素材・ケミカル
電気・電子部品
構造部品・締結要素
ソフトウェア・ネットワーク
サービス
その他
全てのカテゴリ
閲覧履歴
インクリメンタルエンコーダのメーカー20社一覧や企業ランキングを掲載中!インクリメンタルエンコーダ関連企業の2025年5月注目ランキングは1位:パナソニックインダストリー株式会社、2位:オムロン株式会社となっています。 インクリメンタルエンコーダの概要、用途、原理もチェック!
エンコーダとは、電子部品の一種で機械的な移動量や方向、角度をセンサーで検出し電気信号として出力する電子部品です。
エンコーダは検出方法の違いで、インクリメンタルエンコーダとアブソリュートエンコーダに分かれます。
インクリメンタルエンコーダとは、電源ONしてからの位置/回転の変化量ができるエンコーダです。それに対してアブソリュートエンコーダとは、電源がいったん切れても、原点からの絶対位置/回転量を検出することができます。
インクリメンタルエンコーダは、電源を切ったら原点復帰という作業をしない限りは絶対位置が分かりません。この原点復帰が必要かどうかが、インクリメンタルエンコーダとアブソリュートエンコーダの違いです。
関連キーワード
2025年5月の注目ランキングベスト2
| 順位 | 会社名 | クリックシェア |
|---|---|---|
| 1 | パナソニックインダストリー株式会社 |
50.0%
|
| 2 | オムロン株式会社 |
50.0%
|
項目別
8 点の製品がみつかりました
8 点の製品

POSITAL - FRABA
1130人以上が見ています
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...

POSITAL - FRABA
700人以上が見ています
最新の閲覧: 13時間前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...
POSITAL - FRABA
500人以上が見ています
最新の閲覧: 1日前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...

POSITAL - FRABA
480人以上が見ています
最新の閲覧: 1日前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...

POSITAL - FRABA
960人以上が見ています
最新の閲覧: 4時間前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...

POSITAL - FRABA
880人以上が見ています
最新の閲覧: 20時間前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...

POSITAL - FRABA
530人以上が見ています
最新の閲覧: 1時間前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...
POSITAL - FRABA
590人以上が見ています
最新の閲覧: 1日前
100.0% 返答率
52.1時間 返答時間
◾️アブソリュートマルチターンキットエンコーダ/インクリメンタルキットエンコーダ POSITALキットエンコーダは、リアルタイムモーション...
エンコーダとは、電子部品の一種で機械的な移動量や方向、角度をセンサーで検出し電気信号として出力する電子部品です。
エンコーダは検出方法の違いで、インクリメンタルエンコーダとアブソリュートエンコーダに分かれます。
インクリメンタルエンコーダとは、電源ONしてからの位置/回転の変化量ができるエンコーダです。それに対してアブソリュートエンコーダとは、電源がいったん切れても、原点からの絶対位置/回転量を検出することができます。
インクリメンタルエンコーダは、電源を切ったら原点復帰という作業をしない限りは絶対位置が分かりません。この原点復帰が必要かどうかが、インクリメンタルエンコーダとアブソリュートエンコーダの違いです。
インクリメンタルエンコーダの使用用途は様々な機械の位置/速度検出器で、例えば次のような製品に使われています。
インクリメンタルエンコーダはモーターの一構成部品として使われることも多いです。エンコーダで回転軸の回転方向、回転角度を検出し、その情報をモーターの位置制御、速度制御に使用します。
インクリメンタルエンコーダは電気的な検出原理の違いにより、光学式エンコーダと磁気式エンコーダに分かれます。
インクリメンタルエンコーダの位置の検出原理を、光学式エンコーダを例に説明します。
図1に光学式エンコーダの基本構成を示します。光学式エンコーダは主に発光素子、受光素子、ディスク (スケール) で構成されています。
ディスク (スケール) にはスリットが刻まれており、ディスクが回転することで、発光素子から発した光がスリットで透過・遮断を繰り返し、それによって受光素子に光パルスが生成されます。スリットの移動量に応じた数だけパルスが出力され、そのカウント数によって移動量を検知することができます。
スリットにはA相・B相・Z相の3種類のスリットが刻まれており、受光素子はこれら3種類のパルスを検出します。
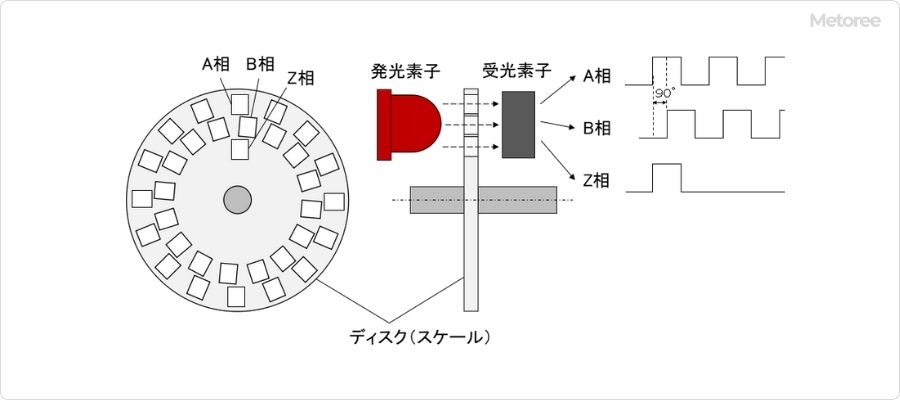
図1. 光学式インクリメンタルエンコーダの構成
エンコーダには直線上の移動量を検出するリニアエンコーダと、回転角度を検出するロータリーエンコーダがあります。図1ではロータリーエンコーダを例に説明しましたが、リニアエンコーダでも原理自体は同じです。
ロータリーエンコーダは円盤状のディスクにスリットが刻まれますが、リニアエンコーダでは定規のような長方形の形状のスケールにスリットが刻まれます。
正転/逆転の回転方向はA相、B相のパルスの立ち上がりの順番で検出することができます。
正転時は、図2のようにA相、B相のパルスの立ち上がりは
A相→B相→A相→B相→…
となります。
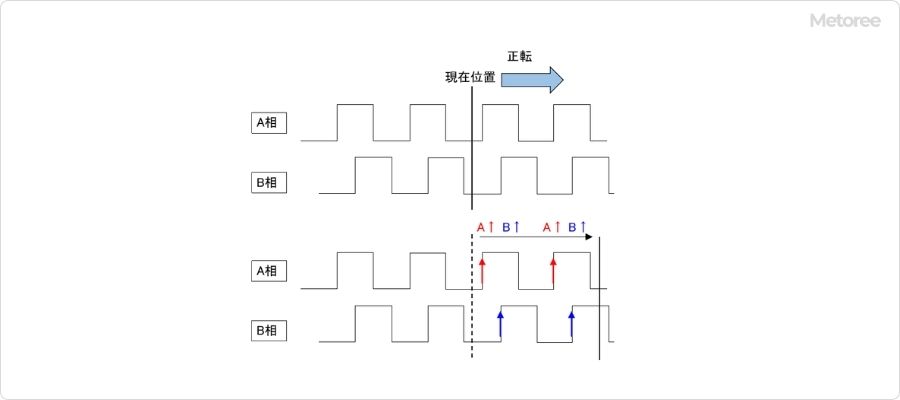
図2. 正転時のA相、B相の検出順番
逆転時は、図3のようにA相、B相のパルスの立ち上がりは
B相→A相→B相→A相→…
となります。
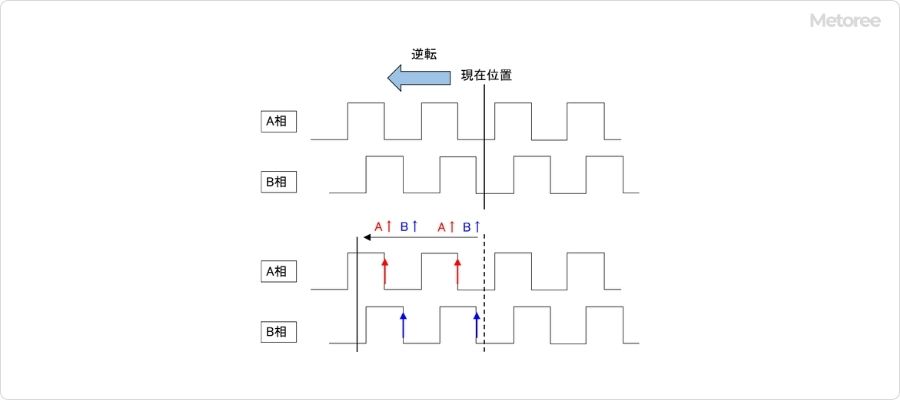
図3. 逆転時のA相、B相の検出順番
A相とB相が1/4周期分ずれているため、それぞれのパルスの立ち上がりの順番で回転方向がわかります。
インクリメンタルエンコーダを選定する際の指標となる主な仕様は下記の通りです。


