触覚センサー
メーカー10社一覧 【2024年】
触覚センサーについての概要、用途、原理などをご説明します。また、触覚センサーのメーカー10社一覧や企業ランキングも掲載しておりますので是非ご覧ください。触覚センサー関連企業の2024年3月注目ランキングは1位:ニッタ株式会社、2位:株式会社マルサン・ネーム、3位:株式会社オーギャとなっています。
触覚センサーとは
触覚センサー (英: Tactile sensor) とは、ヒトの触覚を模したセンサーのことです。
使用されるセンシングデバイスは、接触面の圧力と振動を電気的信号に変えるセンサーであり、このセンサーの働きをヒトの触覚に模倣するために、センサー技術の周辺含め様々な技術的取り組みがなされています。さらに、触覚センサーは温度に対する感受性など複数の情報と統合され、繊細な対象の質感を推定したりする機能を備えるものもあります。
触覚は対象の性質、テクスチャを評価する機能にとどまらず、物を適切な力で掴むため、ペンを握って文字を書いたりするためなど、人の基本動作に重要な役割を果たすことから、ロボティクス技術の発展に必須です。
触覚センサーの使用用途
触覚センサーは、医療診断やロボットへ活用されたり、産業分野への応用されたりしています。
ただし、昨今ではVR (Virtual Reality:仮想現実) に代表されるゲーム空間やメタバース分野への応用も、Hapticsという触覚技術の総称名で多いに期待されています。
1. 触覚センサーの医療への応用
対象の硬さを評価できることから、乳がんや前立腺がんに由来する「しこり」の存在を感度よく捉えることが可能で、がんの早期発見に貢献しています。また、表面の粗さに起因するざらつきを評価することで、皮膚炎や乾皮症などの定量評価に用いられます。
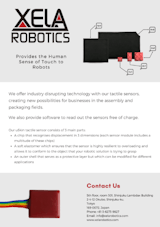
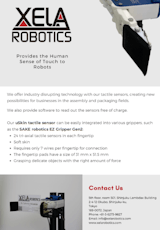
2. 触覚センサーのロボティクスへの応用

ロボティクスでは、指に擬したセンサー開発によりロボットハンド用センサーとして、握力調整のための情報を提供します。
3. 触覚センサーの産業分野への応用
産業においては製品のテクスチャをモニタリングすることで、品質管理に役立てることができます。
4. VR向けのHaptics
VR (Virtual Reality:仮想現実) の世界では、3D向けのゴーグルなどは既に商品化されていますが、このVRにスーツやグローブを装着し、触覚センサーを搭載することで、VRの世界においてより現実感あふれる世界を再現するためのアプリケーション応用が取り組まれています。
触覚センサーの原理
触覚センサーは、物体への接触力を電気量に変換するための様々な物理現象を活用しており、変換デバイス (センサー:素子) を中心に構成されています。これらの電気信号は、信号・情報処理回路を介して解析されます。このセンサーには、原理的に様々な検出様式が採用可能です。
例えば、導電性で挟まれた空間の圧力を加えたことによる変化に伴う静電容量を検知する方法があります。用途にもよりますが、一般的にはセンサー素子として圧電セラミックス素子 (PZT:ジルコン酸チタン酸鉛) が利用されているケースが多いです。圧電セラミックス素子はピエゾ素子とも呼ばれて、圧力を加えることによって電圧変化を生じます。これを圧電効果と呼びます。
ピエゾ素子の固体結晶内のイオンの配置が、圧力を掛けることにより変化することで、結晶の一端がプラスの電気を帯び、もう片方がマイナスの電気を帯びるという、電気分極という現象が起こります。圧力の情報や振動の周波数情報が圧電素子によって電気信号に変換されることで、ASICなどで構成されるアナログ・デジタル各々の処理回路を介して触覚の情報へと変換が可能です。
また、光学的な原理としては、センサー内部の光導波路の散乱光の変化を検出することにより、センサー表面での物体の接触位置を捉えられます。
触覚センサーのその他情報
1. 触覚センサーの市場
触覚センサーの市場規模は、2019年の82億490万$から、2025年までに160億8380万$へ達すると予測されています。
触覚センサーは、⼈と共同で働くことができるロボットの発展を⽀える重要な要素の⼀つです。実例を挙げると、アメリカのMITで開発が進められているRoCycleというロボットでは、材質を識別する触覚センサーをロボットハンドに内蔵し、紙やプラスチック、⾦属を認識して分別することができるように研究が進められています。
韓国の浦項⼯科⼤学校では、ナノスプリングなどを⽤いて、微細な圧⼒や振動を感じ取ることができる⼈⼯指紋センサの開発が進められています。開発の成果として、触覚センサーで得た情報を機械学習で解析し、99.8%の精度で8種類の繊維の区別に成功したと発表しました。触覚センサーの精度が向上することによって、ロボット産業を中心にこれから益々需要が見込まれます。
2. MEMS触覚センサー
MEMS (Micro Electro Mechanical Systems) とは、センサー、電子回路などを、微細加工技術によって基板上に集積化したデバイスのことです。
近年では、MEMS技術を用いた超高感度の触覚センサーが注目されています。
- 香川大学高尾研究室での研究結果はこちら
3. Haptics分野への展開
VRの世界だけでなく、Hapticsは様々な身近な分野にもその応用が広がっています。例えば、スマートフォンの画面のホームボタンや電気自動車のインパネのナビゲーションシステム、電子認証のためのタッチペン、PCのキーボードなどです。
これらの分野では、いかに小型軽量で薄く、臨場感に溢れた触覚センサーを実現できるかが、触覚技術の観点では重要になります。そのため、最先端のMEMS技術や、圧電デバイス技術、アプリケーションソフトウェアの開発に、各メーカーはしのぎを削っています。
参考文献
https://www.jp.tdk.com/tech-mag/knowledge/089
https://www.kagawa-u.ac.jp/ccip/images/2-02/EN-11-022.pdf
https://www.jstage.jst.go.jp/article/jjws/75/4/75_4_230/_pdf
http://www.cmctd.co.jp/tech/sensor/sensor.html
https://www.aeonbank.co.jp/investment/report/pdf/2019090502.pdf

触覚センサーメーカー 10社
*一部商社などの取扱い企業なども含みます。
触覚センサー 2024年3月のメーカーランキング
*一部商社などの取扱い企業なども含みます2024年3月の注目ランキングベスト10
注目ランキング導出方法| 順位 | 会社名 | クリックシェア |
|---|---|---|
| 1 | ニッタ株式会社 |
24.1%
|
| 2 | 株式会社マルサン・ネーム |
17.6%
|
| 3 | 株式会社オーギャ |
11.1%
|
| 4 | タッチエンス株式会社 |
11.1%
|
| 5 | 株式会社アキュレイト |
9.3%
|
| 6 | 日本バイナリー株式会社 |
7.4%
|
| 7 | イナバゴム株式会社 |
5.6%
|
| 8 | Pressure Profile Systems, Inc. |
5.6%
|
| 9 | 有限会社イーダブルシステム |
5.6%
|
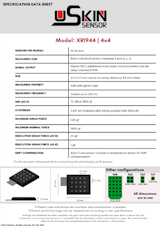
| 10 | XELA・Robotics株式会社 |
2.8%
|
注目ランキング導出方法について
注目ランキングは、2024年3月の触覚センサーページ内でのクリックシェアを基に算出しています。クリックシェアは、対象期間内の全企業の総クリック数を各企業のクリック数で割った値を指します。社員数の規模
- ニッタ: 2,971人
- イナバゴム: 529人
- アキュレイト: 34人
設立年の新しい会社
- XELA・Robotics: 2018年
- タッチエンス: 2011年
- オーギャ: 2009年
歴史のある会社
- ニッタ: 1885年
- イナバゴム: 1963年
- マルサン・ネーム: 1968年
触覚センサーの製品 1点
1 点の製品がみつかりました

株式会社細田
静電容量重量センサ小型 触覚センサー 圧力センサー
250人以上が見ています
最新の閲覧: 5時間前
100.0% 返答率
小型静電容量式圧力・触覚センサーは、 ・ロボットハンド、歩行、走行の足裏などの触覚、圧力において、僅かな力でも均一に圧縮変形す...
触覚センサーのカタログ 10件
Metoreeに登録されている触覚センサーが含まれるカタログ一覧です。無料で各社カタログを一括でダウンロードできるので、製品比較時に各社サイトで毎回情報を登録する手間を短縮することができます。
カタログを企業ごとに探す
- 全ての企業
- XELA・Robotics
- イナバゴム
- ロボセンサー技研
- シスコム
カタログを種類ごとに探す
- 全ての種類
- 製品個別カタログ
- ノウハウカタログ

イナバゴム株式会社
イナストマー フレキシブル基板
カタログ概要
感圧導電性エラストマーセンサー:イナストマー ◇フレキシブル基板 ドーム型 SF-Rシリーズタイプ 感圧導電性ゴムをフレキシブル基板の先端に直接貼り付け...
タグ付けカテゴリ
触覚センサー2022年1月19日

イナバゴム株式会社
イナストマー ゴム材料成形カバー付きタイプ
カタログ概要
感圧導電性エラストマーセンサー:イナストマー ◇ゴム成形カバー ドーム型(D)タイプとプッシュ型(P)タイプ 汎用のゴムカバーで覆われた感圧導電ゴムと、ス...
タグ付けカテゴリ
触覚センサー2022年1月19日

イナバゴム株式会社
感圧導電性ゴムイナストマー
カタログ概要
感圧導電性ゴム『イナストマー』の原理とメカニズム、特徴や実際の使用例をご紹介いたします。
タグ付けカテゴリ
触覚センサー2022年7月25日
触覚センサーのカタログ10件分をまとめてダウンロードできます!お迷いの方は便利な無料の一括ダウンロード機能をご利用ください。



企業
XELA・Robotics株式会社 有限会社シスコム イナバゴム株式会社 ロボセンサー技研株式会社