制御・計測・センシング
駆動・機械要素・電子制御部品
産業別カテゴリ
電源・エネルギー・熱処理機器
安全・保護・環境対策
材料・素材・ケミカル
電気・電子部品
構造部品・締結要素
ソフトウェア・ネットワーク
サービス
その他
全てのカテゴリ
閲覧履歴
ロボットアームのメーカー20社一覧や企業ランキングを掲載中!ロボットアーム関連企業の2025年7月注目ランキングは1位:セレンディップ・ロボクロスマーケティング株式会社、2位:帝華機械株式会社、3位:株式会社安川電機となっています。 ロボットアームの概要、用途、原理もチェック!
ロボットアームは産業用ロボットのうち、人間の手の動きに似せた形のロボットです。
ロボットの構成として、主に6軸の回転軸とリンクで構成されるマニピュレータ部、荷物をつかむハンド部、ロボットの制御や現状確認を行うコントローラ部に分かれます。
ロボットを導入する際には、作業員の安全のために安全柵を設けなければなりません。ただし協働ロボット (協調ロボット) と呼ばれるロボットは、リスクアセスメントを実施し、適切なリスクレベルまで運用することができれば安全柵は必ずしも必要ではありません。
関連キーワード
2025年7月の注目ランキングベスト10
| 順位 | 会社名 | クリックシェア |
|---|---|---|
| 1 | セレンディップ・ロボクロスマーケティング株式会社 |
18.0%
|
| 2 | 帝華機械株式会社 |
11.3%
|
| 3 | 株式会社安川電機 |
9.8%
|
| 4 | 三菱電機株式会社 |
9.8%
|
| 5 | ファナック株式会社 |
8.3%
|
| 6 | 株式会社テイアイテイ |
7.5%
|
| 7 | イグス株式会社 |
6.8%
|
| 8 | KUKA Japan株式会社 |
6.0%
|
| 9 | 株式会社北川鉄工所 |
3.8%
|
| 10 | 澄川精密株式会社 |
3.8%
|
項目別
使用用途
#搬送仕分
#溶接作業
#危険作業代替
可搬重量 kg
1 - 5
5 - 10
10 - 15
15 - 20
リーチ長 mm
300 - 500
500 - 700
700 - 900
900 - 1,100
1,100 - 1,300
1,300 - 1,500
繰り返し位置決め精度 mm
0.01 - 0.02
0.02 - 0.03
0.03 - 0.05
0.05 - 0.1
軸数
5 - 6
6 - 7
最大速度 m/s
1 - 2
2 - 3
3 - 5
入力電圧 V
20 - 100
100 - 200
200 - 250
本体質量 kg
10 - 20
20 - 30
30 - 40
40 - 50
11 点の製品がみつかりました
11 点の製品

株式会社アプコス
390人以上が見ています
最新の閲覧: 10時間前
返信の比較的早い企業
100.0% 返答率
12.9時間 返答時間
■特徴 ・今まで吸着の難しかった液体大袋をソフトに箱詰め。 ・箱詰めの時の衝撃によるピンホールを削減。 ・液体大袋製品から液体小袋...

NBCエンジニア株式会社
770人以上が見ています
最新の閲覧: 10時間前
5.0 会社レビュー
100.0% 返答率
45.4時間 返答時間
■特徴 ・作業者の接触時は停止し安全を確保 ・繰り返し精度±0.03mm ・教示ペンダントで簡単操作 ・CE、NRTLおよびKCs等の認証を取得 ・...
3種類の品番

アスカ株式会社
5870人以上が見ています
最新の閲覧: 11分前
返信の早い企業
100.0% 返答率
10.0時間 返答時間
DOBOT CRは、6つの可搬重量のタイプで構成されています。3kg、5kg、7kg、10kg、12kg、16kgの6種類で、繰り返し精度は±0.02mmです。人間...
6種類の品番






オリエンタルモーター株式会社
440人以上が見ています
最新の閲覧: 13時間前
100.0% 返答率
49.0時間 返答時間
■概要 ・あらゆる角度からワークへアプローチが可能 ・本体質量12.5kg ・最大リーチ長 (水平) 480mm、可搬質量1kg ・駆動モーター:バッ...
ロボットアームは産業用ロボットのうち、人間の手の動きに似せた形のロボットです。
ロボットの構成として、主に6軸の回転軸とリンクで構成されるマニピュレータ部、荷物をつかむハンド部、ロボットの制御や現状確認を行うコントローラ部に分かれます。
ロボットを導入する際には、作業員の安全のために安全柵を設けなければなりません。ただし協働ロボット (協調ロボット) と呼ばれるロボットは、リスクアセスメントを実施し、適切なリスクレベルまで運用することができれば安全柵は必ずしも必要ではありません。
ロボットアームの種類はリンクの接続方式によってシリアルリンクとパラレルリンクに分かれます。リンクが直線的につながっているのがシリアルリンクで、並列につながっているのがパラレルリンクです。
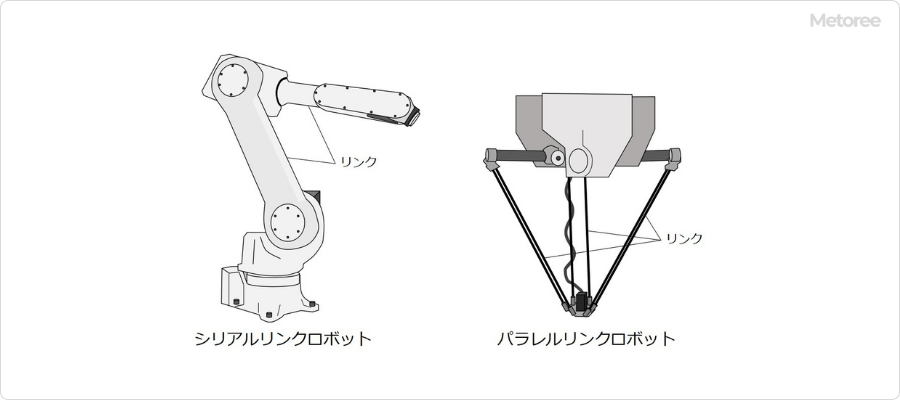
図1. シリアルリンクロボットとパラレルリンクロボット
シリアルリンクロボットはリンクの先に次のリンクが直列につながっているロボットです。可動範囲が広く、人の手のように斜め方向からアプローチして作業できることが特徴です。シリアルリンクロボットは、自由度が高い動きを活かして、次のような用途で使用されています。
自動車のボディなどを部材の金属を溶かして接合させる作業です。ロボットが行うことで、正確でばらつきの少ない溶接が可能になり、品質向上が期待できます。
つかんだ部品を別の部品に組付けたり、ねじ締めなどを行う作業です。垂直多関節ロボットは人の手で行う作業も対応できるため、熟練の職人技のような作業を正確に再現することができます。
垂直多関節ロボットの手先に取り付けたスプレーガンで、自動車のボディなどに色を塗る作業です。
パラレルリンクロボットはベースからリンクが並列に出ており、その先に手先が付いているロボットです。パラレルリンクは動きが速いのが特徴で、次のような用途で使用されています。
ベルトコンベヤで流れてきた食品 (個別包装されたお菓子など) をプラスチック製のトレーに詰める作業
天井から吊り下げたカメラで部品の品質OK/NGを判定し、次の工程に流すか流さないかを振り分ける作業
産業用ロボットは動作を行い作業するマニピュレータ、マニピュレータを動かして制御するロボットコントローラ、マニピュレータに動作を教えるティーチングペンダントの3要素で構成されています。
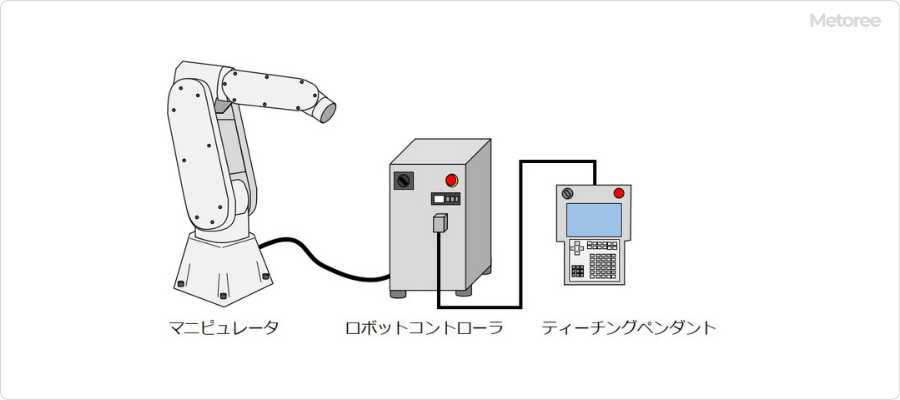
図2. 産業用ロボットの構成要素
シリアルリンクのマニピュレータは、リンクと回転軸で構成されています。回転軸は6つあり、それぞれACサーボモータが駆動源であることが一般的です。この6つの軸は、それぞれ次のような動きをします。
1.旋回: 体全体を旋回させる
2.下腕: 下腕を動かして、体を前後に動かす
3.上腕: 腕を上下に動かす
4.手首旋回: 腕を回転させる
5.手首曲げ: 手首を曲げる
6.手首回転: 手首を回転させる
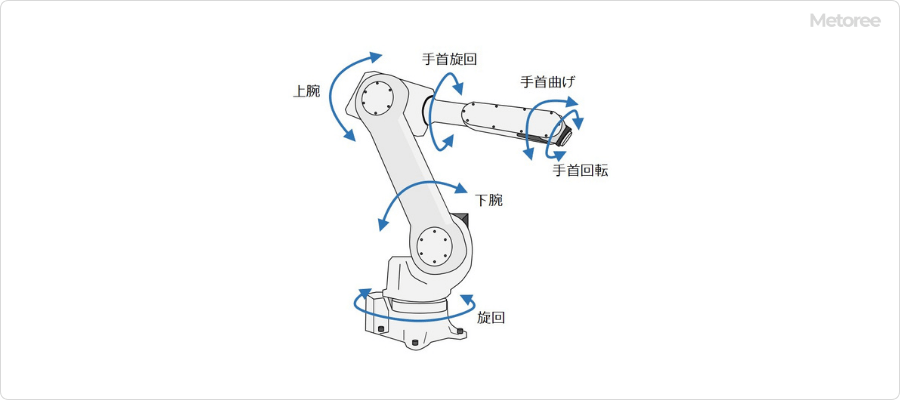
図3. マニピュレータの6つの軸
ロボットが動作を行う際、ロボットコントローラにマニピュレータの手先の位置座標 (X, Y, Z) 、および手先の回転座標 (Rx, Ry, Rz) が与えられます。その手先位置と回転角度に一致するように各軸のモータが動くことで、ロボットは所望の動作を行うことができます。
ティーチングペンダントでロボットに位置を教示する
ティーチングペンダントは、ロボットに位置を記憶 (教示) できる入力装置です。キーボードやタッチパネルを使ってロボットを直接動かし、その姿勢をロボットに教示、再現させることができます。
従来の産業用ロボットのティーチングペンダントは操作には慣れが必要でした。近年は、ダイレクトティーチングと呼ばれる手法で、初心者でも簡単にティーチングができるようになっているロボットも出てきました。
パソコンで座標をプログラミングする
パソコンでプログラミングし、ロボットの座標を指定する方法です。
これまではC言語などのコーディング型のプログラミングが主流でしたが、コーディングはプログラミング自体に習熟する必要があり、プログラムのデバッグに多くの時間がかかるのが課題でした。
近年では、シミュレータ型のプログラミングツールを提供するロボットメーカーが増えました。これは、ロボットのモデルをPC上に映してPC上のロボットを操作することで座標を教示させるプログラミングツールです。ロボットの動きが視覚的に分かり、コーディングに習熟しなくてもロボットの動きを教示できることが特徴です。
画像認識で座標を認識させる
上部からカメラで撮影を行い、ロボットが次に動作すべき場所を判断し、その座標を自動で算出します。この方式はバラ積みピッキングで使用されています。バラ積みピッキングとは箱の中にランダムに積まれている部品を掴み、次の工程のベルトコンベヤに流したり箱詰めしたりする工程です。
画像認識は毎回ロボットが動作すべき座標が変わる作業において有効ですが、システム構築のためのコストがかかるところに留意しましょう。
産業用ロボットアームは工場や製造現場、物流センターなど、様々な業界で普及が進んでいます。人の代わりに夜間や休日も休むことなく作業を行えるのがロボットアーム導入のメリットです。これらのユーザーにとってロボットアームは人手不足を解消する省人化・省力化や、生産性向上に貢献することが期待されています。
生産現場で起こるミスの多くは人的ミスと言われており、人的作業では品質にバラツキや効率の低下もつながると考えられます。産業用ロボットアームを導入すると人的なミスが抑制され、作業の品質や製品の品質を一定に保つことができます。また、生産履歴データが残るため、品質の改善に向けて分析をしたり、クレーム対応の迅速なフィードバックも実現可能です。
さらに、怪我のリスクや事故の可能性が考えられる危険物の取り扱いや高所での作業、重量物の搬送などの重労働、精密さが求められる作業などをロボットが担うことで、従事者の安全確保と労働環境の改善につながります。

