プロトラクタとは
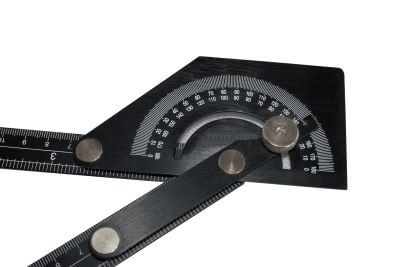
プロトラクタとは、金属製の定規と分度器が合体した形で、ワークにあてて角度を測る測定機器です。
角度計の一種であり、角度の測定やケガキ (線を引くこと) に利用される測定工具のことを指し、デジタル表示が可能で、任意の角度でゼロ調整ができるデジタル式のプロトラクタも存在しています。
目盛りは明瞭に見えるようデザインされており、光沢を抑えることで見やすさを確保しています。主に機械や金型の組立や測定、配管工事、建築などの工事現場で必要不可欠です。
プロトラクタの使用用途
角度の測定はもちろんのこと、金属や木材に角度をケガキする際にも利用されます。このような作業時には、ロックナットと呼ばれるねじを利用して、定規と分度器を固定し、設定した角度で保持が可能です。
プロトラクタは機械加工、金型製作、治具の設定、角度ゲージの加工、建築現場での排水管やその他の配管工事、建物の構築といった多くの場面で使用されます。内角や外角の測定に加え、溶接継手の開先角度を測るゲージタイプもあり、これらは溶接作業にも利用されます。
プロトラクタの原理
通常のプロトラクタは金属製の器具で、定規と分度器が一体化しています。これで外角の測定は可能ですが、内角や小さな角度の測定は困難です。インサイドプロトラクタと呼ばれる種類では、分度器の外側に2本のアームがあり、三角形を形成する構造となっています。
このアームを内角に当てることで、内角の測定が可能となります。ゲージタイプのプロトラクタでは、溶接の開先角度など小さな角度を測定が可能です。これは開先加工した製品に直接差し込んで角度を測定します。
また、溶接作業や板金加工に適したアングルプロトラクタという種類もあり、溶接後の肉盛りや膨らみに干渉せずに測定できるように特殊な形をしています。スラントルールという測定面に強力な磁石を備えたプロトラクタもあり、水平器の要領で鉄筋の勾配を測ることができ、この種類は建築工事に特化した測定器です。
プロトラクタの種類
各プロトラクタは特定の作業や用途に適しており、効率的かつ正確な角度の測定を実現します。選択するプロトラクタは、作業の内容や要求される精度によって異なります。具体的な種類は以下の通りです。
1. 標準プロトラクタ
最も一般的なプロトラクタは金属製の定規と分度器が一体化した形をしており、主に外角の測定に使用されます。
2. デジタルプロトラクタ
角度の表示がデジタルで、任意の角度でゼロ調整が可能です。これにより、読み取りが容易で、高精度の測定が可能となります。
3. インサイドプロトラクタ
分度器の外側に2本のアームがあり、内角の測定が可能です。アームを内角に当てることで、角度の測定が行えます。
4. ゲージタイプのプロトラクタ
主に溶接の開先角度を測定するために使用され、開先加工された製品に直接差し込んで角度を測定します。
5. アングルプロトラクタ
溶接作業や板金加工に特化しており、溶接後の肉盛りや膨らみに干渉しないように特殊な形をしています。
6. スラントルールプロトラクタ
測定面に強力な磁石を備えており、水平器の要領で鉄筋の勾配を測定することができます。このタイプは主に建築工事に特化しています。
プロトラクタの選び方
プロトラクタの選び方は、使用目的、測定範囲、測定精度、材質、価格などによって異なります。以下に、プロトラクタの選び方についていくつかの基本的なポイントを示します。
1. 使用目的
使用目的を明確にして、どのタイプのプロトラクタが最適であるかを判断します。例えば、内角を測定する場合はインサイドプロトラクタ、溶接作業にはアングルプロトラクタやゲージタイプのプロトラクタが適しています。
2. 測定範囲と精度
必要な測定範囲と精度を確認し、これに適したプロトラクタを選びます。デジタルプロトラクタは高精度の測定が可能であり、読み取りも容易です。
3. 材質
使用環境を考慮して材質を選びます。金属製のプロトラクタは耐久性に優れていますが、プラスチック製のものは軽量で取り扱いが容易です。
4. 価格
予算に応じてプロトラクタを選びます。高価なプロトラクタは高精度で品質が良い傾向にありますが、低コストのものでも基本的な測定は十分に行えます。
5. 目盛の見やすさ
目盛がはっきりと読める、かつ目盛の色が見やすいものを選びます。また、光沢が少ないものが好ましいです。
プロトラクタを選ぶ際には、上記のポイントを参考にして、自分のニーズと要求に最適なものを選びましょう。