三相モーターとは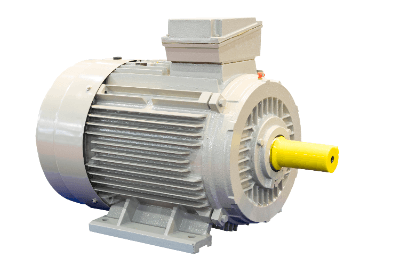
三相モーターとは、三相交流電源で駆動する電動機のことです。
産業用設備や機械の動力源として広く利用されています。三相誘導電動機 (インダクションモーター) とも呼ばれ、AC200Vの三相交流電源を電源として用いるのが一般的です。
三相モーターはステーター、ローター、出力シャフト、フランジブラケット、ボールベアリングなどから構成されています。
三相モーターの使用用途
交流電源は単相と三相で分類されます。単相は主に一般家庭で用いられる交流電源となります。一方三相は主に産業分野で用いられる交流電源となります。
三相モーターの具体的な仕様用途は、次のようなものがあります。
三相モーターの使用用途は幅広く、上記で挙げたもの以外にも多くの産業機械に用いられています。
また、三相モーターの中でも、ステッピングモーターやサーボモーターなどと呼ばれる正確に回転を制御するためのモーターも存在します。これらは産業用の多関節ロボットなどの自動機械を使用する際に用いられます。
三相モーターの原理
三相モーターは120度ずつ位相のずれた三相交流電源をステーターのコイルに印加し、コイル~電磁鋼板が電磁石となり、電動機内に磁界を形成します。コイルに流れる電流の向きと右ねじの法則により電磁石の極性が決まります。
交流電源は時間とともに位相がずれるため、時間に応じて磁界の向きが回転します。
図1に回転磁界の発生原理を示します。三相交流電源のU相、V相、W相の位相が変わるにつれ、ステーターの磁界の向きが変わる(図1では、回転磁界は反時計回りに回転する)ことがわかります。
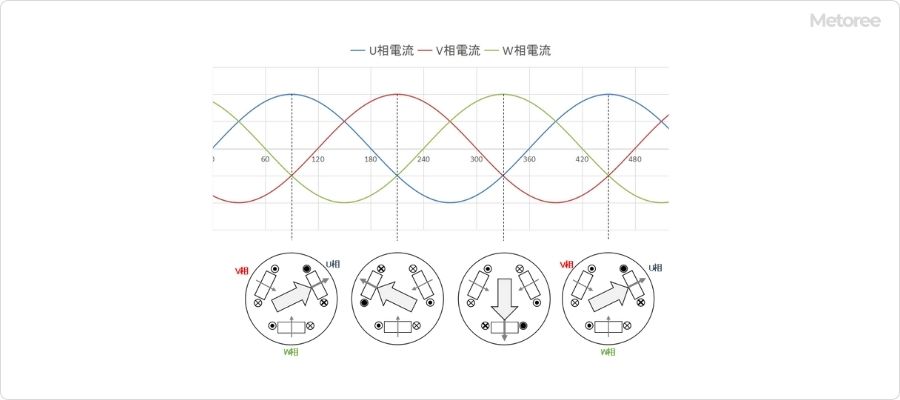
図1. 回転磁界の発生原理
磁界が回転することで回転子へ渦電流が生じ、渦電流と磁界により回転子に力が発生します。その結果、モーターの回転軸に動力が発生します。モーターの回転力は、フレミングの左手の法則により方向が決まります。
ローターが回転する時の回転磁界の速度を同期回転速度と呼びます。同期回転速度は電源の周波数とステーターの極数から算出できます。
実際のローターの回転速度は、同期回転速度より少し遅くなります。これは磁束がローターの導体を横切ることで初めて誘導電流が発生し、それによってローターが回転するからです。
同期回転速度と実際の回転速度との差を「すべり」と呼びます。すべりは負荷トルクが大きくなるほど大きくなります。またモーターの出力(W数) は定格回転速度と定格トルクから算出することができます。
三相モーターのその他情報
1. 三相モーターの配線
三相モーターは始動方式によって、配線方法が異なります。ここでは、4種類の始動方式を紹介します。
直入れ始動
三相モーターの端子に電磁接触器を介して直接三相交流電源を印加して始動する方法です。配線が容易ですが、始動時にモーターに流れる電流 (始動電流) が定格電流の数倍と大きいです。
指導電流が小さい小容量の電動機で使用されることが多いです。
スターデルタ始動
スター結線で始動し、その後デルタ結線に切り替える始動方式です。
モーターの結線にはスター結線とデルタ結線があります (図2) 。スター結線はデルタ結線と比べて始動電流が1/3と少なくて済むので、定格電流の大きい三相モーターで使用される始動方法です。
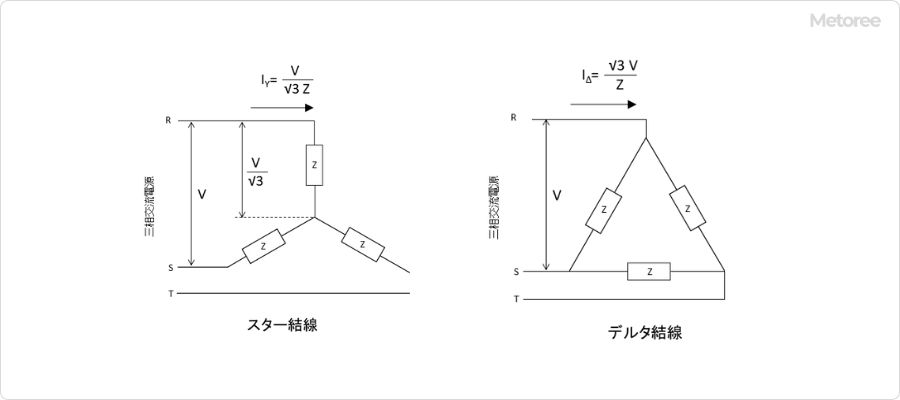
図2. スター結線とデルタ結線
スターデルタ始動方式のモーターの端子箱にはU・V・WとX・Y・Zの6つの端子があり、UVWとXYZにそれぞれ三相電源を接続します。ステーターの巻線の外には電磁接触器とタイマーを組み合わせた回路があり、スター結線とデルタ結線を自動で切り替えます。
リアクトル始動
始動時に三相モーターと電源の間にリアクトルを接続し、始動してしばらくした後に電磁接触器とタイマーでリアクトルの回路を切り離す方法です。
インバータ始動
インバーターは、三相モーターの回転数を制御する電気機器です (図3) 。三相交流電源の出力や周波数を自在に変えることができます。
インバーターを導入することで、数Hz程度の低い周波数からモーターを始動でき、始動電流を小さくすることができます。
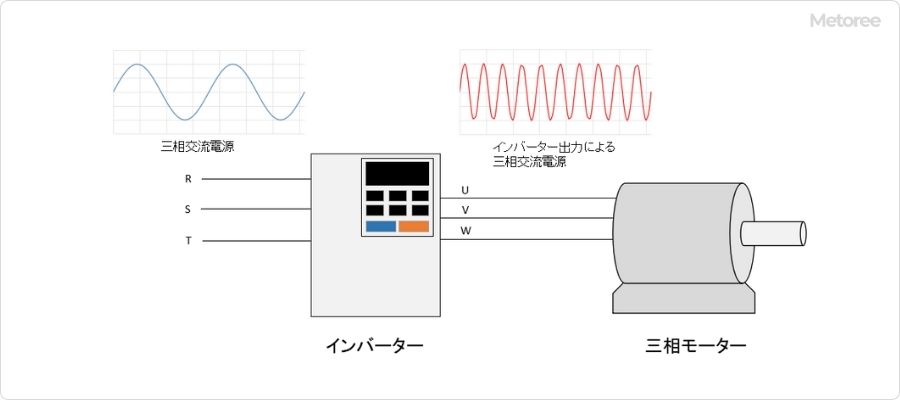
図3. 三相モーターとインバーター
2. 三相モーターの回転数
回転数の計算式は、120×交流電源の周波数÷極数となります。
例えば、4極モーターで50Hz電源の場合、回転数は120×50÷4=1500 rpmとなります。
ただし、三相モーターは電源周波数より少し遅れて回転します。この遅れをすべり率で表現します。すべり率が5%であれば、回転数は1500× (1-0.05) = 1425 rpmになります。
三相モーターの速度を制御するためには、周波数か極数を制御する必要がありますが、極数はモーターの構造なので、変えることができません。よって、周波数を変更して速度を制御することになります。現在では、三相モーターの速度制御にはインバーターを用いるのが主流になっています。
参考文献
https://www.orientalmotor.co.jp/om/knowledge/uroko_ac/ac02.html
https://www.nidec.com/jp/technology/motor/basic/00026/
https://jp.aspina-group.com/ja/learning-zone/columns/what-is/005/
https://t-denso.com/archives/511
https://elec-tech.info/motor-tech1/