USBマイクロスコープとは
USBマイクロスコープ (英: USB microscope) とは、伝統的な光学顕微鏡と一線を画する革新的なデジタルデバイスです。
その名の通り、USBインターフェースを介してコンピュータやモバイルデバイスと直接接続可能なこのマイクロスコープは、高解像度のデジタルイメージングと快適な操作性を兼ね備えています。従来の顕微鏡では物理的な目視や外部カメラの装着が必要だった観察が、USBマイクロスコープによって一変。瞬時にデジタル画像データとして取得が可能となりました。
特に技術者や研究者にとって、サンプルの高精細な画像をリアルタイムで共有や保存が容易になるのは、極めて大きなメリットです。コンパクトでありながら高性能を持つこのデバイスは、研究施設や教育機関、産業界など幅広い場面での利用が期待されています。
USBマイクロスコープの使用用途
1. 産業界の品質管理と検査
精密部品や回路基板の微細な欠陥を検出するため、USBマイクロスコープは頼りにされています。高解像度のデジタルイメージングを活用して、生産ライン上の瑕疵や不具合を素早く特定が可能です。
2. 生物学・医学の研究
細胞や微生物のリアルタイムの高精細画像取得が求められる場面で、USBマイクロスコープは大変有効です。保存されたデータをもとに、詳細な解析や比較研究を行うことも容易です。
3. 教育・トレーニングのツール
教育機関やトレーニングセンターでは、学習者が観察したい対象をデジタル画像として捉え、大画面での共有や議論の材料として使用できます。
4. 美術・考古学の詳細分析
古代の遺物や美術作品の詳細な構造や技法を調査する際に、USBマイクロスコープは役立ちます。微細な部分を非破壊・非接触での調査が行えるため、保存状態を保ちつつ詳細な分析が可能です。
5. 宝石・鉱石の鑑定
宝石や鉱石の細部に見られる特徴や欠陥を観察する際、USBマイクロスコープは鑑定士にとっての信頼のツールとなります。高精度な画像は、真正品と偽物の識別にも有効です。
USBマイクロスコープの原理
USBマイクロスコープは、伝統的な光学顕微鏡とデジタル技術を組み合わせたデバイスとして登場しました。このマイクロスコープの主な仕組みや原理は、以下の通りです。
1. 光学システム
まず基本となるのは、光学システムです。光学顕微鏡同様、対象を拡大して観察するためのレンズが内蔵されています。多くのUSBマイクロスコープは、複数のレンズを組み合わせることで、必要な倍率に応じて精密な観察を行うことができます。
2. デジタルイメージセンサー
このマイクロスコープの最も特徴的な部分です。伝統的な顕微鏡が目で直接観察するのとは対照的に、USBマイクロスコープはデジタルセンサーを利用して、拡大された対象をデジタル画像として捉えます。このセンサーは、一般的にCMOSまたはCCDセンサーと呼ばれるものを使用しています。
3. デジタル信号処理
イメージセンサーで捉えられたデータは、内蔵されたプロセッサを通じてデジタル信号に変換されます。この段階で、画像の色補正やシャープネスの調整など、様々な画質の最適化が行われる場合があります。
4. USBインターフェース
変換されたデジタル信号は、USBインターフェースを介してコンピュータやモバイルデバイスに送信されます。このUSB接続により、高速でのデータ転送が可能となり、リアルタイムでの高解像度画像観察が実現します。
5. ソフトウェア統合
USBマイクロスコープと連携する専用ソフトウェアが多くの製品に同梱されています。これにより、画像のキャプチャ、分析、保存、共有などの機能が手軽に利用できます。
USBマイクロスコープの種類
USBマイクロスコープの技術進化に伴い、多様な形状や機能を持つ製品が市場に登場しています。ここでは、その主な種類である「デスクタイプ」と「ハンドヘルドタイプ」を詳しく解説します。
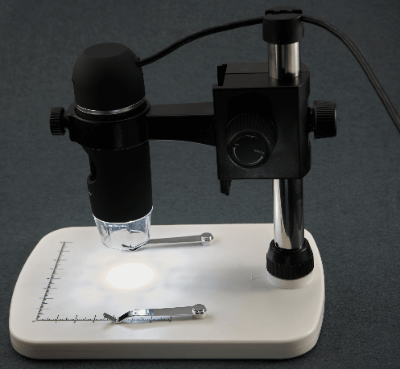
1. デスクタイプ
| 概要 | デスクタイプのUSBマイクロスコープは、研究室やオフィスのデスク上での使用を前提とした設計になっています。安定した台座やスタンドに固定されたマイクロスコープ本体が特徴です。 |
| 安定性 | 固定された台座により、振動や手ブレの影響を受けにくい。 |
| 高精度 | 精密なフォーカス調整や高倍率の観察が容易。 |
| 拡張性 | 追加の照明やフィルター、特殊なレンズなど、様々なオプションを装着可能。 |
| 主な用途 | 精密な観察や分析が必要な研究、工業的品質検査、教育機関での教材利用など。 |
2. ハンドヘルドタイプ
| 概要 | ハンドヘルドタイプのUSBマイクロスコープは、持ち運びやすさと即座に使用できる利便性を重視したデザインです。手に持って直接観察対象に近づけることができるため、非常にフレキシブルな使用が可能です。 |
| モビリティ | 小型軽量で、場所を選ばずに使用できる。 |
| 直感的操作 | 複雑な設定や調整なしに手軽に観察が行える。 |
| 主な用途 | 屋外でのフィールドワーク、現地調査、教育現場での実験や観察、一般消費者向けの趣味や教育用。 |
これらの選択に際しては、使用するシーンやニーズに合わせて適切なタイプの選択が重要です。どちらのタイプもUSBマイクロスコープの基本的な機能を持っており、その使用方法や目的に応じて最大の効果を発揮します。
参考文献
https://ranking.goo.ne.jp/select/9575
https://www.shodensha-inc.co.jp/ja/sh140ccd-2r/