垂直多関節ロボットとは
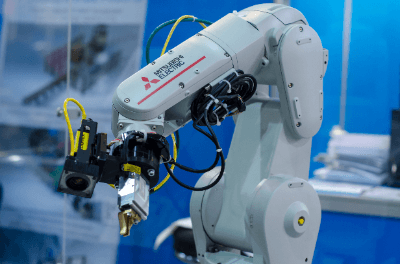
垂直多関節ロボットは、人の手の様に動作することができる産業用ロボットの一種です。
駆動するための軸が少ないロボットに比べて自由度が高く、人の手で行っていた作業や自由度の低いロボットで時間をかけて行っていた作業を効率良く進めることができます。垂直多関節ロボットは動作範囲が広いため、精密な作業を繰り返し行うことが得意です。その特徴を活かせる生産現場に導入することで、業務効率化が期待できます。
垂直多関節ロボットの使用用途
垂直多関節ロボットは、自動車や家電製品、食品など使用される分野は幅広いです。生産ラインにおいて、以下の工程で使用されます。
1. 溶接
自動車のボディなどを部材の金属を溶かして接合させる作業です。ロボットが行うことで、正確でばらつきの少ない溶接が可能になり、品質向上が期待できます。
2. 搬送
製品や部品を等間隔で高速に並べたり、高重量の荷物を移動させたりする作業です。
3. 組立
つかんだ部品を別の部品に組付けたり、ねじ締めなどを行う作業です。垂直多関節ロボットは人の手で行う作業も対応できるため、熟練の職人技のような作業を正確に再現することができます。
4. 塗装
垂直多関節ロボットの手先に取り付けたスプレーガンで、自動車のボディなどに色を塗る作業です。
5. 検査
検査用のカメラやセンサの計測範囲内に部品を近づけて、外観や品質の良し悪し (OK/NGなど) を判定させる作業です。
垂直多関節ロボットの原理
垂直多関節ロボットは、マニピュレータとコントローラ、ティーチングペンダントで構成されています。
1. マニピュレータ
マニピュレータは、ロボットアーム本体の部分です。関節に取り付けられたサーボモーターによって、様々な動作を行います。マニピュレータ先端には、垂直多関節ロボットが作業を行うための次のような道具を装着します。
2. コントローラ
コントローラはマニピュレータを制御するための装置で、次のような機能があります。
- PLCなどの上位装置からの指令に応じてロボットの次の動作を決定する
- ロボットが精密な動きをするためにモーターの動作を演算、指令する
- 動作上の異常を検知して停止する
近年の製品ではAIが搭載されているものも多く出回っています。ティーチングしなくても、次はどのように動けばよいかロボット自身が判断して動作する製品もあります。
3. ティーチングペンダント
ティーチングペンダントとは、垂直多関節ロボットを人間が操作するための装置です。キーボードやタッチパネルを使ってロボットに動作を記憶させたり (ティーチング)、ロボットに異常が発生したときにアラーム内容を確認したりする際に使用します。
垂直多関節ロボットのその他情報
1. 垂直多関節ロボットと水平多関節ロボットの違い
垂直多関節ロボットと水平多関節ロボットの違いは「できる動作の複雑さ」にあります。
垂直多関節ロボット
垂直多関節ロボットは、一般的に6つの軸を持ち、それぞれの軸を回転させることで、3次元空間上を自由に移動できるような動作が可能です。つまり、X・Y・Zといったような水平・垂直動作に加えて、Rx・Ry・Rzといった回転動作も行うことができます。
水平多関節ロボット
水平多関節ロボットは、基本的に水平方向に動作する軸を3つ持ち、垂直方向に動作する軸を1つ持つような4軸構成で成り立っています。つまり、3つの軸を使って水平方向を自由に移動し (3次元方向で表せばX・Y) 、残りの1軸で垂直方向に移動します (3次元方向で表せばZ) 。そのような構造を持つため、水平多関節ロボットは、3次元空間での回転動作 (Rx・Ry・Rz) を行うことはできません。
2. 垂直多関節ロボットを導入するメリット
垂直多関節ロボットを導入し、今まで人が行っていた作業をロボットに置き換えられると次のようなメリットがあります。
工場の生産性が上がる
ロボットは精密な作業、または単調な繰り返し作業 (例えば製品のピックアンドプレース) が得意です。このような作業を垂直多関節ロボットに行わせると、働き手はより付加価値の高い仕事に集中できるようになります。これによって、工場の生産性を上げることが可能です。
ロボットを導入した工程の品質が上がる
ロボットは人間と違って同じ作業を繰り返ししたときにばらつきが少なく、品質向上が期待できます。垂直多関節ロボットを導入することで、繰り返し±0.1mm程度のばらつきで溶接したり、毎回正確な量で塗布したりすることが可能になります。
参考文献
https://www.jstage.jst.go.jp/article/kikaic1979/69/688/69_688_3293/_pdf
https://www.jstage.jst.go.jp/article/kikaic1979/61/581/61_581_259/_pdf
https://robogaku.jp/content/files/history/037_01.pdf