多関節ロボットとは
多関節ロボットとは、アームにジョイントという関節を複数持つロボットのことです。
ジョイントは、アームの曲げ伸ばしや上下動作、回転動作、さらに伸縮動作を行います。
多関節ロボットは、曲げ伸ばしといった人間の動きに似た関節や、伸縮動作といったロボット特有の直動関節を持っています。これによって、人間に代わって様々な作業をさせることが可能となります。
多関節ロボットの中の主要なものは、垂直多関節ロボットと水平多関節ロボットです。それぞれアームとジョイント構造が違い、得意とする作業が異なります。
多関節ロボットの使用用途
多関節ロボットは、次のような作業を人間の代わりに行わせるのが主な使用用途です。
- 重い荷物を持ち上げるような重労働作業
- 繰り返し同じことを長時間行う作業
- 熟練した技能が必要な作業
- センサーやカメラを使った検査作業
ロボットは人間と違って疲れることがなく、同じ作業を正確に長時間行えます。単純作業をロボットに任せると人間は付加価値のある工程に従事できるため、工場の生産性を上げることができます。
また、ロボットの正確な動作が再現できる特性を使って、熟練した技能者の動きを正確にトレースが可能です。これによって、退職間近のベテラン技能者の技術をロボットに引き継いで、業務の属人化を防ぐことが期待されています。近年のAI技術の発展に伴って、センサーやカメラなどを多関節ロボットに取り付けて、検査を自動化することも可能です。
多関節ロボットの原理
ロボットにおけるリンクとジョイントはそれぞれ人間の骨と関節部分にあたります。ジョイントは回転軸や直動機構によってリンクの可動範囲が広がり、人間と同じような作業をロボットで行うことが出来ます。
ロボットの駆動源は、初期のロボットは油圧駆動でしたが、現在はモーター駆動が一般的です。電子制御によってより精密な動作を実現しています。
多関節ロボットのその他情報
1. 多関節ロボットのジョイントの動作
多関節ロボットのジョイントの動作は下記の通りです。
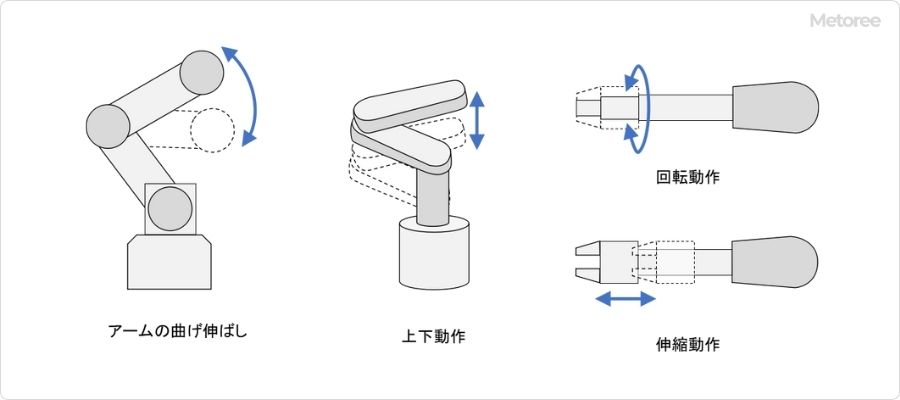
図1. 多関節ロボットのジョイントの動作
1. 垂直多関節ロボットとは
垂直多関節ロボットはジョイントがアームを垂直方向に動かす方向についているロボットです。一般的に6つの軸を持ち、X・Y・Zといったような水平・垂直動作に加えて、Rx・Ry・Rzといった回転動作も行うことができます。
垂直多関節ロボットは人間の腕に近い動作ができるので、
- 溶接、塗装など斜め方向からのアプローチが必要な作業
- 侵入経路が複雑な場所へのワーク搬送作業
といった作業が得意です。
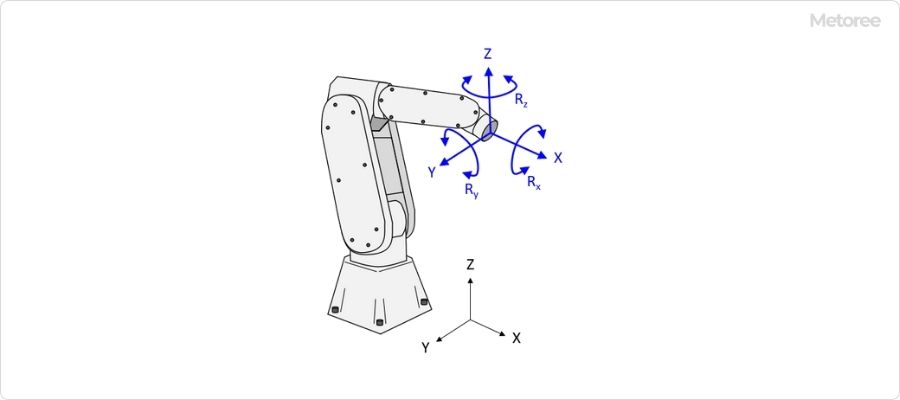
図2. 垂直多関節ロボット
2. 水平多関節ロボットとは
水平多関節ロボットは主に水平方向に動作する3つの回転軸を備えています。スカラロボットと呼ばれることも多いです。水平方向の回転軸に加えて、上下方向に動作する1軸が付加された製品が一般的です。
水平多関節ロボットは、垂直多関節ロボットと比べて次のようなメリットがあります。
- 平面内の動き(X・Y・Rz方向)が素早い
- 上下方向の剛性が高い
- 低価格
水平多関節ロボットのメリットを活かした作業は、次のようなものがあります。
- ベルトコンベヤからワークをピックし、箱詰めする作業
- 垂直方向のネジ締め作業
- ワークの平面内の整列作業
水平多関節ロボットと水平多関節ロボットは同じ多関節ロボットでも特性が違うため、実施したい仕事に合わせて使い分ける必要があります。
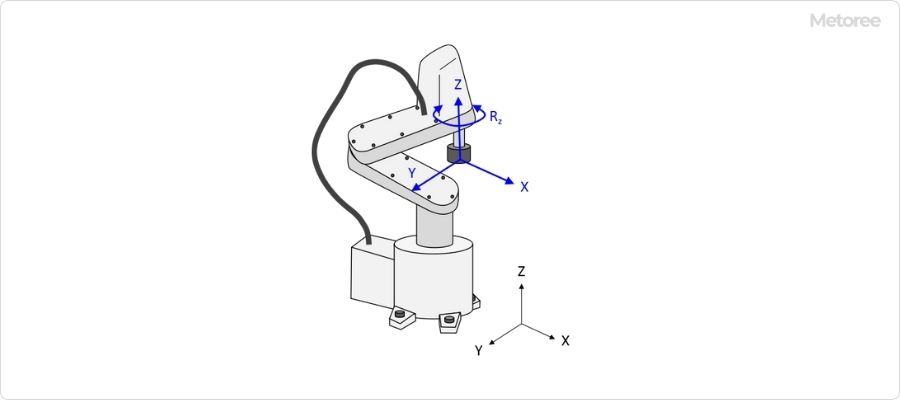
図3. 水平多関節ロボット
3. 低価格な多関節ロボット
産業用の製品だと百万円以上する多関節ロボットですが、近年は低価格な多関節ロボットが様々なメーカーから販売されるようになりました。これらのロボットは、電子工作やプログラミング学習用途が主な用途です。
安価なものだと数万円から購入することができますが、低価格なロボットは関節構造やモーターに安価なものを採用しているため、位置決め精度や繰り返し停止位置精度、動作速度や耐久性が格段に劣ります。購入する際には実用に耐えうるものなのかをしっかり判断する必要があります。
参考文献
https://www.denso-wave.com/ja/robot/product/five-six/
https://www.shibaura-machine.co.jp/jp/product/robot/lineup/tv/
https://www.keyence.co.jp/ss/products/vision/fa-robot/industrial_robot/mechanism.jsp
https://www.fa.omron.co.jp/products/category/robotics/industrial-robots/articulated-robots/