CANとは
CANとは「Controller Area Network」の略で、ドイツのBoschが開発したシリアル通信プロトコルのことを指します。
CAN通信プロトコルが完成したのは1985年です。自動車業界に幅広く使われている通信プロトコルですが、量産車に採用されたのは1990年であり、その後国際標準化機構によって標準規格として定められました。
CANは自動車業界だけでなく、FA(ファクトリーオートメーション)領域でも多く利用されている技術です。
CANの使用用途
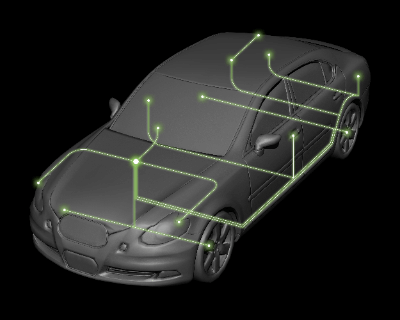
CAN通信プロトコルは、自動車業界での使用を前提として開発されました。主な用途はECU(Electronic Control Unit)間での通信です。
近年の自動車は電子制御されており、各デバイスが高速に正確に通信できる必要があります。CAN通信はホストコンピュータがなくとも、デバイス同士が相互に通信できるように設計されており、さらに耐ノイズ性も高いため、信頼できる通信技術として自動車には欠かせない通信プロトコルといえます。
CANの特徴
CANは自動車のECUへ対応するための通信プロトコルとして開発されたため、それに起因する特徴がいくつもあります。
自動車は年々高性能化していったため、制御内容が複雑になりました。制御内容が複雑になればECUへの入出力も増えていき、ECU間でデータのやりとりをするための配線も増加します。それではECUは大型化してしまい、重量や部品点数も多くなり、製造コストが肥大します。
この問題を解決するために、少ない配線で高速かつ信頼度の高い通信技術が必要とされ、その結果誕生したのがCAN通信プロトコルなのです。
前述の背景の中誕生したCAN通信プロトコルは、以下の特徴を持ちます。
- 少ないハーネスでECU間を接続できる
- 拡張性が高い
- ECU同士の通信が容易に実現できる
- ひとつの情報を複数のECUで共有できる
- ネットワーク全体の故障診断や処理が1箇所でできる
CAN通信プロトコルのこのような優れた特徴は、複雑化する自動車制御分野においてブレークスルーをもたらし、日本車をはじめとする世界の自動車の高機能化に大きく貢献しました。
参考文献
https://www.keyence.co.jp/ss/products/recorder/lab/candata/base.jsp