Was ist ein RC-Servomotor?
RC-Servomotoren sind kleine Servos für funkferngesteuerte Fahrzeuge. Ursprünglich wurden sie hauptsächlich für funkferngesteuerte Fahrzeuge wie Autos und Flugzeuge verwendet, aber in letzter Zeit sind sie auch als Gelenke für Roboter weit verbreitet und es gibt von verschiedenen Herstellern speziell für Roboter konzipierte RC-Servomotoren.
RC-Servomotoren bestehen aus einem Mikrocomputer, einem Motor, einem Untersetzungsgetriebe und einem Positionssensor und können durch ein Signal in jedem Winkel angehalten werden.
Anwendungen von RC-Servomotoren
Aufgrund ihrer geringen Größe und ihres geringen Gewichts, aber ihres hohen Drehmoments werden sie hauptsächlich in funkgesteuerten Spielzeugen verwendet. In den letzten Jahren hat sich die Leistung besonders stark entwickelt, so dass sie heute nicht nur in Hobbyanwendungen, sondern auch in kleinen Robotern weit verbreitet sind.
Einer der Gründe für ihren Einsatz ist, dass sie oft preiswert sind und verschiedene Bewegungen auch ohne spezielle Kenntnisse der Steuerungstechnik leicht zu realisieren sind.
Funktionsweise von RC-Servomotoren
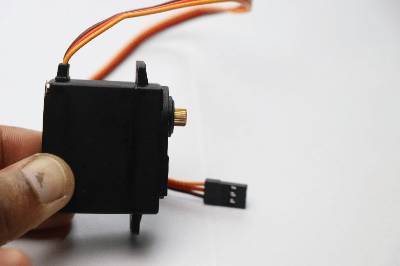
Die meisten RC-Servomotoren haben drei parallele Drähte, die miteinander verbunden sind. Durch die Eingabe von impulsartigen Signalen an diese Signaldrähte kann der Motor in jeden beliebigen Winkel bewegt werden. Die Steckerform ist eine Buchse mit einem Raster von 2,54 mm.
- Signalleitung: Leitung, die für impulsförmige Signaleingänge verwendet wird. Die Farben sind in den meisten Fällen weiß, blau, gelb oder orange.
- Stromleitung +: Leitung, die für den Anschluss des Motors an die Stromversorgung + der Steuerleiterplatte verwendet wird; es ist die mittlere Leitung der drei parallelen Leitungen und hat häufig die Farbe rot.
- Stromleitung -: Leitung zur Verbindung der GND-Leitung zwischen dem Motor und der Steuerleiterplatte. Im Allgemeinen ist die Farbe oft schwarz oder braun.
Jeder RC-Servomotor hat eine definierte Drehposition und Drehrichtung in Bezug auf Impulse und der Motor kann durch Eingabe von impulsartigen Signalen gemäß diesen Spezifikationen in jeden beliebigen Winkel bewegt werden. Im Allgemeinen besteht die Spezifikation darin, HIGH-Impulse mit einem „15-20 mS-Zyklus“ und einer „0,5-2,5 mS-Breite“ hinzuzufügen. Die Position, an der sich der Motor dreht, hängt von der Breite der Impulse ab, so dass es notwendig ist, ein Signal einzugeben, das den Spezifikationen entspricht.