What Is a Slide Switch?
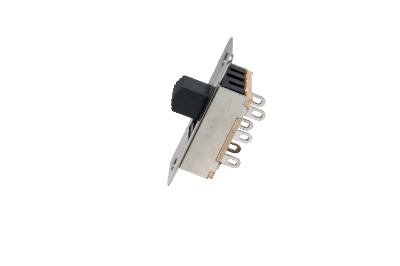 A slide switch is a switch that is turned on and off by sliding a knob.
A slide switch is a switch that is turned on and off by sliding a knob.
There are vertical and horizontal slide switches, and they are also used in familiar electrical appliances. However, their use in digital products is decreasing. There are various terminal connection methods for slide switches, including through-holes, right angles, solder, and screws. In recent years, miniaturization has progressed, and some products are mounted as DIP switches.
Uses of Slide Switches
Slide switches are used in a wide range of applications, from industrial products to home appliances. The following are examples of slide switch applications.
- Home appliances such as electric fans
- Portable products such as shavers and hair dryers
- Lighting fixtures such as flashlights
- Industrial equipment settings such as inverters
Some of the low-profile products are as thin as 1.4 mm in thickness, and are becoming smaller and smaller. Compact slide switches are sometimes used as dip switches integrated into circuit boards. Some products have a self-cleaning effect by using an ingenious contact mechanism.
Principle of Slide Switches
A slide switch consists of terminals, a knob/casing, and contacts.
The terminal is the component that connects the external wiring. Pin-shaped or soldered terminals are used. Generally, copper alloys and other materials are used, but expensive contacts made of gold or silver may be used for low current loads.
The knob is a movable part that is operated by a person, and the casing is a part that supports and insulates other parts. Strong insulating materials are preferred, so hard synthetic resins are generally used. Below the knob is a movable slice of the contact point, which can be switched by switching the knob.
The contact point is a part that serves as a pathway for electricity and is composed of a movable and a fixed intercept. Products that make contact at two points are more reliable as switches than those that have a single point of contact between the movable and fixed interlocks. In addition, the clip-type sliding contact method can be expected to have a self-cleaning effect.
How to Select a Slide Switch
Slide switches are selected according to the number of circuits and terminals required. Specifically, selection should be made from the following perspectives:
1. Allowable Current and Allowable Voltage
Allowable current is the amount of current that a slide switch can energize. The larger the allowable current, the larger the current that can flow, but the smaller the size, the smaller the allowable current tends to be. Products ranging from several tens of A to several hundreds of mA are available, and generally products of 0.1 to 1A are common.
The allowable voltage (withstand voltage) is the amount of voltage that a product can withstand; products intended for use at 100 VAC are often labeled as having an allowable voltage of 125 VAC. For board mounting, the allowable voltage is often 30VDC.
2. Mounting Method
The mounting method is to install a slide switch. The mounting method is closely related to the terminal shape, and includes board surface mounting and board hole insertion. There are also various shapes, such as products with switches arranged vertically or horizontally to the mounting surface.
3. Functional Action
The functional operation of slide switches includes pole, throw, and contact type. These are often combined and expressed as “two-pole, double-throw” and so on.
The poles of a switch are the number of circuits that can be opened and closed by performing a single operation. It refers to how many contact points on an electrical circuit can be switched at the same time by sliding the switch. Many small products have one pole, and products with two to four poles are available.
The contact type refers to the type of contact that is activated by switching, such as a-contact or b-contact. Slide switches have normally open, and normally closed terminals and often use a c-contact with a single common terminal. The throw of a switch refers to the number of operations performed by the switch. Slide switches are generally of the twin-throw type, meaning that the throw of the switch has two contacts.
4. Switching Method
Switching method is the contact action when switching. Shorting and non-shorting products are available.
Shorting is a method in which two or more contacts conduct simultaneously when switching contacts, while non-shorting is a method in which the circuit is disconnected once at the moment of switching contacts. Generally, non-shorting products are more common.