制御・計測・センシング
駆動・機械要素・電子制御部品
産業別カテゴリ
電源・エネルギー・熱処理機器
安全・保護・環境対策
材料・素材・ケミカル
電気・電子部品
構造部品・締結要素
ソフトウェア・ネットワーク
サービス
その他
全てのカテゴリ
閲覧履歴

返答率
100.0%
返答時間
18.6時間
シリーズ
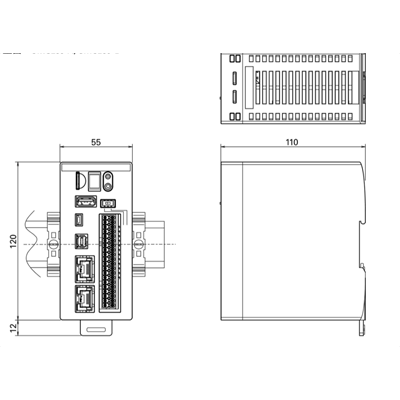
C-887.53x EtherCAT ®搭載ヘキサポッド モーション コントローラー取扱企業
ピーアイ・ジャパン株式会社カテゴリ
| 商品画像 | 品番 | 価格 (税抜) | 軸/チャネル | 追加軸 | プロセッサー | アプリケーション関連機能 | IDチップ検出 | 構成管理 | サポートされているセンサー信号 | 閉ループ値 | 最大制御周波数 (サーボ周期) | モーションタイプ | モーションコーディネーション | 基準スイッチ入力 | リミットスイッチ入力 | 通信インターフェース | オン/オフスイッチ | 表示とインジケーター | 手動制御 | コマンドセット | ユーザーソフトウェア | ソフトウェア - API | アナログ入力 | アナログ入力信号 | デジタル入力 | デジタル入力信号 | デジタル出力 | デジタル出力信号 | 動きに依存する入力と出力 | 産業用イーサネットプロトコル | EtherCATデバイスクラス | EtherCAT通信プロファイル | |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
C-887.53 |
要見積もり |
6 |
2つの単軸 |
Intel Atom デュアルコア (1.8 GHz) |
コントローラ マクロ GCS、コントローラ マクロ PIPython、データ レコーダ、スキャン プロシージャ、スタートアップ マクロ |
IDチップ2.0 |
IDチップ読み取り、パラメータ手動入力 |
A/B 直交位相、RS-422 BiSS-C |
位置 |
10,000Hz |
プロファイルジェネレーターによるポイントツーポイントモーション、ターゲット位置のサイクリック転送、エリアスキャンルーチン、グラディエントサーチルーチン、ウェーブジェネレーター |
多軸協調動作、ユーザー定義座標系、ワークおよびツール座標系 |
TTL |
TTL |
EtherCATスレーブ、RS-232、TCP/IP、USB (手動制御ユニットのみ) |
ハードウェアスイッチのオン/オフ |
ステータスLED、エラーLED、電源LED、マクロLED |
USBインターフェース付きマニュアルコントロールユニット |
GCS2.0 |
PIMマイクロムーブ |
MATLAB、NI LabView、Python |
4 |
4 x -10 ~ 10 V、12 ビット |
4 |
TTL |
4 |
TTL |
デジタルトリガー入力、デジタルトリガー出力、アナログセンサー入力 |
EtherCAT |
EtherCATスレーブ |
EtherCAT 経由の CAN アプリケーション プロトコル (CoE) |
|
|
|
C-887.531 |
要見積もり |
6 |
2つの単軸 |
Intel Atom デュアルコア (1.8 GHz) |
コントローラ マクロ GCS、コントローラ マクロ PIPython、データ レコーダ、高速アライメント、スキャン手順、スタートアップ マクロ |
IDチップ2.0 |
IDチップ読み取り、パラメータ手動入力 |
A/B 直交位相、RS-422 BiSS-C |
位置 |
10,000Hz |
プロファイルジェネレーターによるポイントツーポイントモーション、ターゲット位置のサイクリック転送、エリアスキャンルーチン、グラディエントサーチルーチン、ウェーブジェネレーター |
多軸協調動作、ユーザー定義座標系、ワークおよびツール座標系 |
TTL |
TTL |
EtherCATスレーブ、RS-232、TCP/IP、USB (手動制御ユニットのみ) |
ハードウェアスイッチのオン/オフ |
ステータスLED、エラーLED、電源LED、マクロLED |
USBインターフェース付きマニュアルコントロールユニット |
GCS2.0 |
PIMマイクロムーブ |
MATLAB、NI LabView、Python |
6 |
2 x -5 ~ 5 V、16 ビット、5 kHz 帯域幅。4 x -10 ~ 10 V、12 ビット |
4 |
TTL |
4 |
TTL |
デジタルトリガー入力、デジタルトリガー出力、アナログセンサー入力 |
EtherCAT |
EtherCATスレーブ |
EtherCAT 経由の CAN アプリケーション プロトコル (CoE) |
|
|
|
C-887.532 |
要見積もり |
6 |
2つの単軸 |
Intel Atom デュアルコア (1.8 GHz) |
コントローラ マクロ GCS、コントローラ マクロ PIPython、データ レコーダ、スキャン プロシージャ、スタートアップ マクロ |
IDチップ2.0 |
IDチップ読み取り、パラメータ手動入力 |
A/B 直交位相、RS-422 BiSS-C |
位置 |
10,000Hz |
プロファイルジェネレーターによるポイントツーポイントモーション、ターゲット位置のサイクリック転送、エリアスキャンルーチン、グラディエントサーチルーチン、ウェーブジェネレーター |
多軸協調動作、ユーザー定義座標系、ワークおよびツール座標系 |
TTL |
TTL |
EtherCATスレーブ、RS-232、TCP/IP、USB (手動制御ユニットのみ) |
ハードウェアスイッチのオン/オフ |
ステータスLED、エラーLED、電源LED、マクロLED |
USBインターフェース付きマニュアルコントロールユニット |
GCS2.0 |
PIMマイクロムーブ |
MATLAB、NI LabView、Python |
4 |
4 x -10 ~ 10 V、12 ビット |
4 |
TTL |
4 |
TTL |
デジタルトリガー入力、デジタルトリガー出力、アナログセンサー入力 |
EtherCAT |
EtherCATスレーブ |
EtherCAT 経由の CAN アプリケーション プロトコル (CoE) |
|
|
|
C-887.533 |
要見積もり |
6 |
2つの単軸 |
Intel Atom デュアルコア (1.8 GHz) |
コントローラ マクロ GCS、コントローラ マクロ PIPython、データ レコーダ、高速アライメント、スキャン手順、スタートアップ マクロ |
IDチップ2.0 |
IDチップ読み取り、パラメータ手動入力 |
A/B 直交位相、RS-422 BiSS-C |
位置 |
10,000Hz |
プロファイルジェネレーターによるポイントツーポイントモーション、ターゲット位置のサイクリック転送、エリアスキャンルーチン、グラディエントサーチルーチン、ウェーブジェネレーター |
多軸協調動作、ユーザー定義座標系、ワークおよびツール座標系 |
TTL |
TTL |
EtherCATスレーブ、RS-232、TCP/IP、USB (手動制御ユニットのみ) |
ハードウェアスイッチのオン/オフ |
ステータスLED、エラーLED、電源LED、マクロLED |
USBインターフェース付きマニュアルコントロールユニット |
GCS2.0 |
PIMマイクロムーブ |
MATLAB、NI LabView、Python |
6 |
2 x -5 ~ 5 V、16 ビット、5 kHz 帯域幅。4 x -10 ~ 10 V、12 ビット |
4 |
TTL |
4 |
TTL |
デジタルトリガー入力、デジタルトリガー出力、アナログセンサー入力 |
EtherCAT |
EtherCATスレーブ |
EtherCAT 経由の CAN アプリケーション プロトコル (CoE) |
もっと見る
モーションコントローラーの製品280点中、注目ランキング上位6点
電話番号不要
何社からも電話が来る心配はありません
一括見積もり
複数社に同じ内容の記入は不要です
返答率96%
96%以上の方が返答を受け取っています
返答時間が24時間以内の企業の中での注目ランキング
電話番号不要
何社からも電話が来る心配はありません
一括見積もり
複数社に同じ内容の記入は不要です
返答率96%
96%以上の方が返答を受け取っています
モーションコントローラーをフィルターから探すことができます