制御・計測・センシング
駆動・機械要素・電子制御部品
産業別カテゴリ
電源・エネルギー・熱処理機器
安全・保護・環境対策
材料・素材・ケミカル
電気・電子部品
構造部品・締結要素
ソフトウェア・ネットワーク
サービス
その他
全てのカテゴリ
閲覧履歴

返答率
100.0%
返答時間
57.3時間
設置環境
クリーンルーム内 大気中 温度10℃~35℃ 湿度70%RH以下
アーム
シングルアーム 材質 アルミ・CFRP・セラミック
動作範囲
X軸:500mm θ軸:340deg Z軸:300mm ハンド回転:0~180°
動作速度 (最速)
X軸:500mm/sec θ軸:200deg/sec Z軸:250mm/sec ハンド回転:180deg/sec
可搬質量
3kg (ハンドベース・ハンド・ワーク重量の合計)
被搬送物
~300mmウェーハ
ウェーハ保持方式
真空吸着・エッジクランプ・エッジホールド
機械構造形式
水平多関節型 円筒座標系
制御軸
4軸
モータタイプ
ACサーボモータ アブソリュートエンコーダ仕様
重量
本体重量:約47kg コントローラ:約8kg
制御ケーブル
3m (標準) ・5m・10m
制御仕様 (1)
パラレルインターフェース 入力32点 出力32点
制御仕様 (2)
シリアルインターフェース RS-232C×1回線
繰り返し精度
±0.1mm以下
クリーン度
ISOクラス2 (0.1μm以上 10個/m³以下)
定格電圧
単相AC200~230V±10%
定格電流
5A真空:-80kPa以下 10NL/min以上
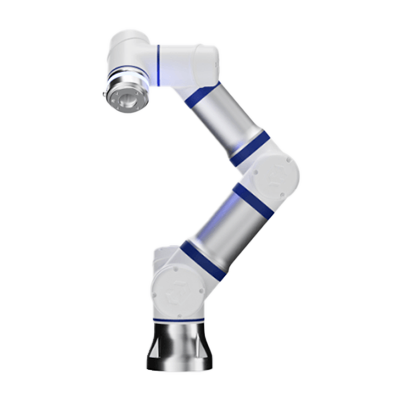
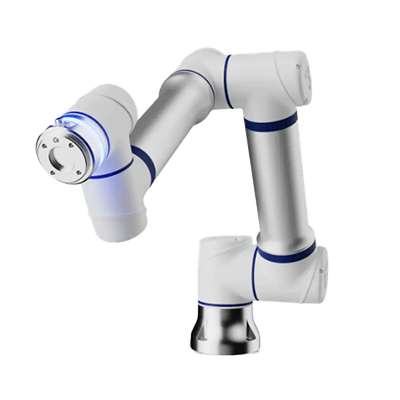
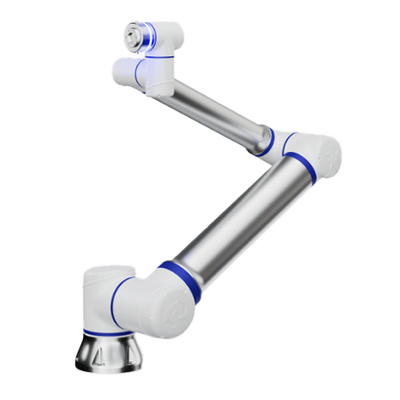
型番
PHT-R-4-2022シリーズ
ウェーハ搬送ロボット取扱企業
PHT株式会社カテゴリ
| 商品画像 | 価格 (税抜) | 設置環境 | アーム | 動作範囲 | 動作速度 (最速) | 可搬質量 | 被搬送物 | ウェーハ保持方式 | 機械構造形式 | 制御軸 | モータタイプ | 重量 | 制御ケーブル | 制御仕様 (1) | 制御仕様 (2) | 繰り返し精度 | クリーン度 | 定格電圧 | 定格電流 |
|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|---|
|
|
要見積もり | クリーンルーム内 大気中 温度10℃~35℃ 湿度70%RH以下 | シングルアーム 材質 アルミ・CFRP・セラミック |
X軸:500mm θ軸:340deg Z軸:300mm ハンド回転:0~180° |
X軸:500mm/sec θ軸:200deg/sec Z軸:250mm/sec ハンド回転:180deg/sec |
3kg (ハンドベース・ハンド・ワーク重量の合計) | ~300mmウェーハ | 真空吸着・エッジクランプ・エッジホールド | 水平多関節型 円筒座標系 | 4軸 | ACサーボモータ アブソリュートエンコーダ仕様 |
本体重量:約47kg コントローラ:約8kg |
3m (標準) ・5m・10m | パラレルインターフェース 入力32点 出力32点 | シリアルインターフェース RS-232C×1回線 | ±0.1mm以下 | ISOクラス2 (0.1μm以上 10個/m³以下) | 単相AC200~230V±10% | 5A真空:-80kPa以下 10NL/min以上 |
もっと見る
クリーンロボットの製品24点中、注目ランキング上位6点
電話番号不要
何社からも電話が来る心配はありません
一括見積もり
複数社に同じ内容の記入は不要です
返答率96%
96%以上の方が返答を受け取っています
クリーンロボットの中でこの商品と同じ値をもつ製品
クリーン度がClass 2の製品
クリーンロボットをフィルターから探すことができます
使用用途
#半導体製造 #液晶製造 #クリーンルーム管理 #医療機関 #自動搬送 #表面清掃駆動方式
車輪型 無人型動作機構
回転ブラシ型 吸引型センサー技術
超音波センサー型 赤外線センサー型クリーン度
Class 1 Class 2 Class 3可搬質量 kg
0 - 1 1 - 5 5 - 10繰り返し精度 mm
0 - 0.05 0.05 - 0.1 0.1 - 0.2ロボット形状
2軸円筒座標形 3軸円筒座標形 4軸円筒座標形本体質量 kg
0 - 50 50 - 100 100 - 200 200 - 500 500 - 1,000定格電圧 V
0 - 50 50 - 250運転時間 時間
0 - 2 2 - 4 4 - 6 6 - 10 10 - 15 15 - 20清掃幅 mm
0 - 400 400 - 500 500 - 1,000 1,000 - 2,000