プローバーとは
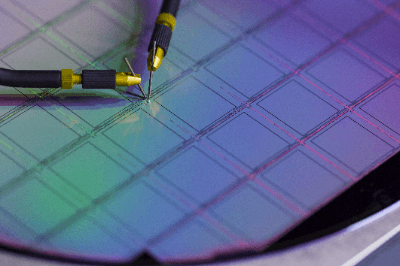
プローバーは、プローブ(針)を任意の位置に固定するための装置で、プローブステーションとも呼ばれます。主に半導体のウェーハ製造過程やICの設計開発において、前工程での半導体のウェーハの電気的な項目測定のために、測定装置の接触部のプローブを半導体の電極の正しい位置に接続する位置決めの装置です。
半導体の電極部分はその面積が非常に小さいため、正確な位置に検査装置の接触部分のプローブを当てる必要があります。位置決めをする上で、非常に正確な制御性がプローバーには求められます。
半導体チップ以外にも、PCB基板や、センサーやフィルターなどの各種薄膜基板、LTCCなどのセラミック基板パッケージの電気的特性の評価などにもよく用いられている装置です。
プローバーの使用用途
プローバーの使用用途は、一般に半導体や薄膜基板、パッケージ基板などの電気的特性の検査時に使用されます。研究開発用に使用する場合には、ノイズの除去や信号の漏れ(クロストーク)を防ぐ機能を有し、高精度で測定可能で、測定手法に関しても可能な限り汎用性が高く柔軟に行えるような機種が必要です。
一方で量産用に使用する場合には、高速で素早い処理を正確かつ大量に行うことができる機能が最も重要視されますので、多種多様なプローバーの機種から、用途に合わせて適切に選定する必要があります。
温度特性評価時に、高温や低温状態で正しく動作するかを確認するために、プローバー側にも温度に対する耐性が求められます。またパワーデバイス用の半導体の測定等に用いる場合には、高電圧で低インピーダンス対応可能なプローバーが必要です。
プローバーの原理
最も代表的なシリコンウェーハ用途のプローバーを以下説明します。プローバーは、シリコンウェーハを固定するためのウェーハチャック、ウェーハチャックをXY方向に移動させるためのステージ、検査用の複数のプローブが取り付けられており、ステージに対して、Z方向に移動するコンタクトプレート、位置決めのためのカメラなどで構成されています。
これらの機構に加えて、シリコンウェーハを移動させるための搬送システムもプローバーの製品に含まれていることも多くあります。動作原理としては、シリコンウェーハをセットすると、ウェーハチェックの位置までシリコンウェーハが搬送されて固定されます。
その後、ステージによってXY方向の位置決めがされ、測定用のプローブとシリコンウェーハ上の半導体の電極の位置が調節された状態で、コンタクトプレートがZ方向に動作して、プローブと電極が接触します。この過程を経て、半導体の電気特性を検査装置で検査することが可能です。
プローバーのその他情報
1. 半導体デバイスの小型化とプローバーへの要求
近年の半導体デバイスの小型化に伴い、微小電流測定は半導体デバイスの製造品質を評価する重要な指標です。半導体デバイスの設計・製造において、デバイスの材料・結晶成長パラメータやジオメトリの変更は、予期せぬデバイス内部の電流パスを生じさせる可能性があり、これを一般的にリーク電流と呼んでいます。
リーク電流の増加は、格子欠陥、ゲート酸化物の構造、基板の選定などによって生じ、過剰な電力消費の誘発や場合によっては絶縁破壊電圧を下げてしまうのです。近年、半導体デバイスのFETのゲート長やバイポーラトランジスタのエミッタサイズなどが非常に微細になっており、駆動に必要な電圧が低下しつつある反面、リーク電流は増加傾向です。
そこで品質評価の観点からプローバーを用いた高精度の電流測定が要求されています。その精度を高める一つの施策として、極低温プローブの開発等が進められています。
2. プローバーの位置決め精度とポジショナー
プローバーのコンタクトポジション精度は、測定精度にそのまま影響を与えます。正しくプロービングできていない状態で、各種評価を実施してしまうと何を評価しているのかがわからなくなります。
例えば、半導体デバイスの特性評価を行いたいにも関わらず、ウェーハの所定位置からずれ、絶縁体上にプロービングしてしまった場合、期待した結果とは乖離が大きく評価結果はNGとなることは想像に難くありません。
評価対象に求められる精度を理解したうえで、その精度を向上させることに注力する必要があります。プローバーの位置決め精度を決めるのはポジショナ(マニピュレータ)と呼ばれる部材です。要求仕様に適したポジショナーを正しく選定することによって、位置決め精度は大きく変わります。
ポジショナーの仕様は、①移動量②移動分解能③調整感度④外形寸法の4つでほぼ決まります。それぞれの仕様の中身については以下を参照してください。
- 移動量
XYZ方向の移動可能量です。通常mmオーダーで記載されることが多いです。 - 移動分解能
1回転あたりの移動量で定義されます。 - 調整感度
最小調整可能距離での定義です。多くの場合μmで規定されます。 - 外形寸法
ポジショナーの大きさです。一般的には大きさに比例して値段が上昇します。
3. 高周波対応プローバー
半導体トランジスタの高周波(RF)対応の評価やデバイスのモデリングにはRF評価に適したプローバーが必要になります。
一般に専用のキャリブレーション基板を用いるGSGプローブ(信号用のパッド両脇にグランド(GND)が具備されている針)を用いますが、測定する周波数によってはプローブのみならず、ネットワークアナライザや各種測定装置へのRFケーブルにも注意が必要です。このケーブルのたわみなどが、RFの測定結果に影響を与える場合があるためです。
マイクロ波よりも高い周波数のミリ波帯においては、専用のVNAエクステンダーを用いますが、プローバー構成そのものが測定に与える影響が非常に大きいために、装置の構成は専用のメーカーと詳細に議論する必要があります。
参考文献
https://patents.google.com/patent/US4864227A/en
https://www.toyo.co.jp/material/casestudy/detail/id=31224
https://www.hisol.jp/products/plo/plo-option/positioner.html