AGV・AMR制御FMSとは
FMSとは、Fleet Management Systemの略でAGV (無人搬送車、英: Automatic Guided Vehicle) やAMR (自律走行搬送ロボット、英: Autonomous Mobile Robot) などの搬送業務を行うロボットの複数台の効率的な制御を行うシステムです。
AGVやAMRなどの搬送ロボットは、物流倉庫や製造現場を中心に搬送業務の省力化・効率化を目的として導入が進められています。FMSは複数の自動運転車両の走行予定・計画などを管理するためのシステムで、群制御モジュールなどと呼ばれる場合もあります。
新たに発生したタスクに対して、どのAGVやAMRをアサインするのが最適なのか、渋滞やお見合い状態を避けるためにはそれぞれのAGVやAMRにどのような経路を割り当てればよいのか、などを判断し、最適な運行計画を実現します。
AGV・AMR制御FMSの使用用途
AGV・AMR制御FMSは、AGVやAMRなどの搬送ロボットが用いられている現場において導入されています。特に、複数台のAGVやAMRが用いられているような広い倉庫や工場などの現場での活用が中心です。
複数台のAGVやAMRが動いている現場においては、FMSなどの上位システムが交通整理をしなければ、搬送機同士が通路に同時侵入し、どちらも動けずに停止してしまうデッドロック現象が発生してしまいます。また複数台を効率的に動かし、生産性を最大化するためにはタスクの割り振りやそれぞれのAGVやAMRのたどる経路を最適化しなければなりません。
FMSは、上記のシチュエーションにおいて、複数台のAMR、AGVの統括的かつ効率的な制御を行い、工場や倉庫の搬送自動化の基盤となっているシステムです。
AGV・AMR制御FMSの原理
1. 概要
FMSは、搬送ロボットへのタスクの 割り当て (配車制御) 、各AGVやAMRへの経路の割り当て(経路生成) 、交差点などでの同時侵入回避制御(交差点制御)などの機能を主とし、複数台のAGVやAMRの搬送効率を最大化するシステムです。
各搬送ロボットの稼働状態をリアルタイムで監視した上で上記の制御を行っているため、UI (ユーザーインターフェース) では各機体のリアルタイム位置やログなどを確認することができます。また、走行距離、異常回数や残充電量なども管理して、充電スケジュールの調整します。
2. 配車制御
新たに発生したタスクに対してどのAGVやAMRをアサインするかを決定するのが交差点制御機能です。それぞれの機体の現在のステータス (搬送中なのか、帰還中なのかなど) 、残充電量、リアルタイム位置などを考慮し、多くのケースでは「もっとも近くにいて手空きの機体」をアサインします。
3. 経路生成
それぞれのAGVやAMRに最適な経路を割り当てるのが経路生成機能です。各機体のリアルタイム位置や目的地を考慮し、単純に最短な経路を生成し割り当てるケースだけではなく、現在運行中のAGVやAMRの残存パス (今後通る経路) を考慮し、できるだけ重複や渋滞を避ける経路を割り当てます。
4. 交差点制御
交差点の通行や、すれ違いのできない狭い通路の走行を制御するのが交差点制御機能です。交差点においては右側優先や、タスクの優先順位付けなどのルールに基づき、片方に進行許可をもう片方に一時停止命令を出し、同時侵入し停止してしまう状態に陥らないように管理します。
狭い通路の走行に関しては、両側からAGVやAMRが同時に侵入してしまうと鉢合わせしてしまうため、仮想的な信号を設け、機体の通路への侵入を管理します。
AGV・AMR制御FMSの種類
AGV・AMRを制御するFMSは、様々なシステムがあります。メーカー間の差として注目されるのが接続性です。多くのシステムが特定のAGVやAMRとしか接続することができない一方で、一部のFMSはメーカーや機種をまたいだ自動搬送機の群制御を行っています。
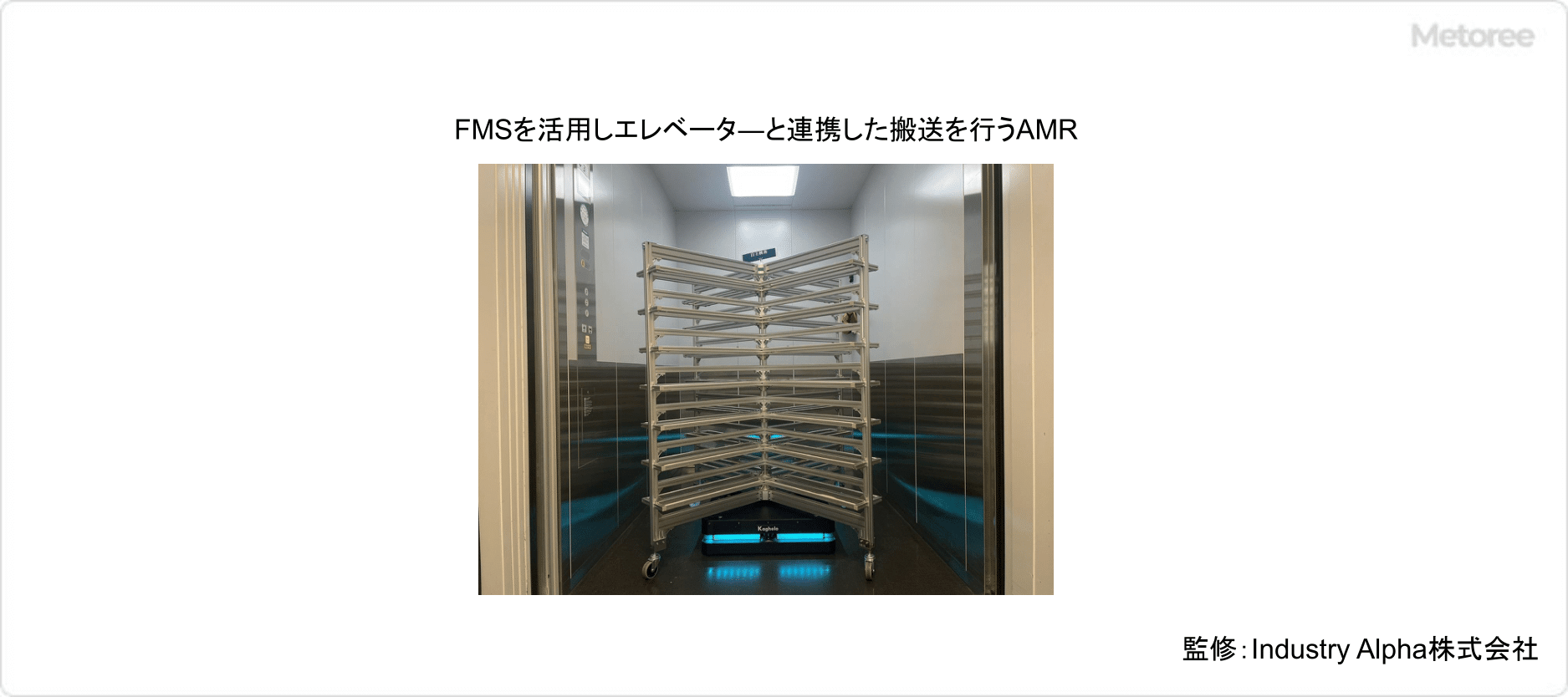
また、工場や倉庫を自動化する際に連携が必要なのはAGVやAMRだけではありません。PLCで制御されるプレス機や溶接機、フォークリフト、ロボットアーム、エレベーター、MESやWMSなどの上位システム、との情報共有及び協調制御が必要になります。FMSを自動化プラットフォームととらえた際に、いかに接続性、拡張性が高いかが焦点となります。