Was ist ein SCARA-Roboter?
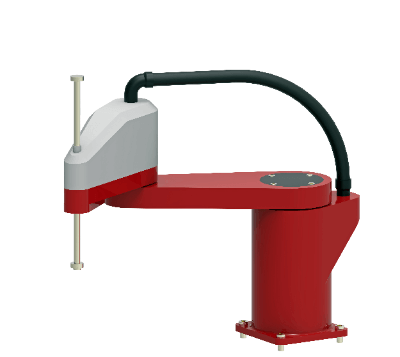 SCARA-Roboter sind horizontal gelenkige Industrieroboter mit drei Rotationsachsen für die horizontale Bewegung und einer Achse für die vertikale Bewegung.
SCARA-Roboter sind horizontal gelenkige Industrieroboter mit drei Rotationsachsen für die horizontale Bewegung und einer Achse für die vertikale Bewegung.
Die Abkürzung SCARA-Roboter steht für „Selective Compliance Assembly Robot Arm“.
SCARA-Roboter zeichnen sich durch folgende Merkmale aus:
- Schnelle horizontale Bewegungen
- Relativ niedrige Kosten
- Hohe mechanische Steifigkeit in vertikaler Richtung (da alle drei Drehachsen vertikal angeordnet sind)
Dank dieser Eigenschaften werden SCARA-Roboter für Montageaufgaben wie das Einsetzen und Platzieren von Teilen und das Festziehen von Schrauben eingesetzt und tragen so zur Automatisierung von Produktionsstätten bei.
Anwendungen von SCARA-Robotern
SCARA-Roboter werden häufig in Produktionslinien für Lebensmittel und elektronische Substrate eingesetzt. Neben diesen Anwendungen gibt es eine Vielzahl weiterer Einsatzmöglichkeiten wie z. B. Pick & Place-Arbeiten für Komponenten und andere Teile, Einpressen, Dosieren, Montagearbeiten usw.
1. Anwendungen in Lebensmittelproduktionslinien
- Befüllen von Kunststoffschalen mit Lebensmitteln (z. B. einzeln verpackte Süßwaren), die über ein Förderband gelaufen sind
- Verpacken von retortenverpackten Lebensmitteln in Versandkisten
2. Anwendungen in Produktionslinien für elektronische Leiterplatten
- Kommissionieren und Ablegen von Bauteilen auf Trays, nachdem sie von der Teilezuführung in loser Schüttung angeordnet wurden
- Bestücken von Trays mit elektronischen Bauteilen (z. B. Steckverbindern) auf elektronischen Leiterplatten
- Auflegen der bestückten Leiterplatten auf Prüfmaschinen und Einrichten der Leiterplatten für den nächsten Prozess nach der Prüfung
3. Andere Anwendungen
- Anziehen von Schrauben: an mehreren Stellen mit einem elektrischen Schraubenzieher am Ende des Roboters
- Auspacken von Kartons: Schneiden von Klebeband und leeren Kartons
- Anbringen von Etiketten: Anbringen einer speziellen Hand zum Anbringen von Etiketten an der Spitze des Roboters
Funktionsweise von SCARA-Robotern
SCARA-Roboter bestehen grundsätzlich aus vier Bewegungsachsen: drei Rotationsachsen und eine Vertikalachse; alle drei Achsen werden für die horizontale Bewegung der Armspitze verwendet. Aufgrund dieser Konfiguration können SCARA-Roboter als Roboter bezeichnet werden, die auf horizontale Bewegungen spezialisiert sind.
Die drei Drehachsen werden verwendet, um die Roboterspitze horizontal zu bewegen, wobei sie sich mit hoher Geschwindigkeit direkt über dem Werkstück bewegt und dann werden die vertikalen Achsen verwendet, um die Roboterspitze direkt über dem Werkstück anzufahren. Anschließend führt er Aufgaben wie das Greifen des Werkstücks aus.
Die Spitze des SCARA-Roboters kann je nach Aufgabe mit folgenden Werkzeugen ausgestattet werden:
- Pneumatische Sauggreifer
- Pneumatischer Greifer
- Elektrische Greifer
- Schraubenspannvorrichtungen
- Spender
Für die Bedienung von SCARA-Robotern ist ein Teach-in erforderlich. Bislang wurde in der Regel ein spezielles Werkzeug, ein sogenanntes Teach-Pendant, verwendet. In den letzten Jahren gibt es immer mehr SCARA-Roboter, bei denen die Benutzerfreundlichkeit im Vordergrund steht, z. B. Modelle, die am PC geteacht werden können und Modelle, die auch von Anfängern leicht geteacht werden können, das so genannte Direkt-Teaching.
Weitere Informationen zu SCARA-Robotern
1. Hochgeschwindigkeits-SCARA-Roboter
Einige SCARA-Roboter sind für den Hochgeschwindigkeitsbetrieb ausgelegt. Wenn der Roboter mit hoher Geschwindigkeit arbeitet, trägt er zur Steigerung der Produktivität der gesamten Anlage bei.
Je schneller ein SCARA-Roboter eine Aufgabe erledigen kann, desto schneller kann er das Werkstück an einen nachfolgenden Prozess weitergeben. Dadurch verkürzt sich die Zeit für die Herstellung eines einzelnen Produkts. SCARA-Roboter mit höherer Geschwindigkeit erhöhen daher die Produktivität der gesamten Linie.
Mit folgenden Maßnahmen lassen sich SCARA-Roboter realisieren, die mit hohen Geschwindigkeiten arbeiten können:
- Erhöhung der Leistung des Motors, um das Gewicht des Arms zu reduzieren
- Erhöhung der Steifigkeit der Gelenke
- Steuerung des Roboters zur Unterdrückung von Vibrationen
2. SCARA-Roboter mit Kameras
Die Leistung des Roboters selbst kann durch die Übertragung von Informationen von der Kamera an den SCARA-Roboter erhöht werden. Nehmen wir den Fall eines SCARA-Roboters, der Schrauben an einem Werkstück anzieht. Die Werkstücke haben individuelle Schnittpunkte und genau genommen hat jedes eine etwas andere Größe.
Selbst wenn der SCARA-Roboter, der die Schraube hält, in die Teach-Position fährt, kann daher eine Situation entstehen, in der das Gewindeloch am Werkstück nicht mit der Position der Schraubenspitze am Ende des SCARA-Roboters übereinstimmt. In solchen Situationen schlägt das Anziehen der Schraube oft fehl.
Hier wird eine Kamera eingesetzt, um die Schraubenlöcher zu fotografieren und die Abweichung von der Referenzposition zu berechnen. Der Betrag der Abweichung wird dann an den SCARA-Roboter übermittelt, der die Position korrigiert, indem er sie auf den ursprünglichen Teach-Punkt verschiebt.
Auf diese Weise kann der SCARA-Roboter den Schraubvorgang unabhängig davon durchführen, wo sich das Schraubenloch im Bildbereich der Kamera befindet. Dieser Mechanismus ist als ‚Bildpositionskompensation‘ bekannt und wird in der Fabrikautomation häufig eingesetzt.