Was ist eine Robotersteuerung?
Eine Robotersteuerung ist ein Steuergerät, das die Bewegungen eines industriellen oder kollaborativen Roboters steuert.
Eine Robotersteuerung besteht aus einem Steuerungsteil, der die Platinen zur Steuerung der Roboterbewegungen enthält, und einem Benutzerschnittstellenteil (U/I). Der Steuerungsteil kommuniziert mit der Außenwelt, z. B. mit einer SPS und seine Hauptaufgabe ist die Steuerung des Roboters.
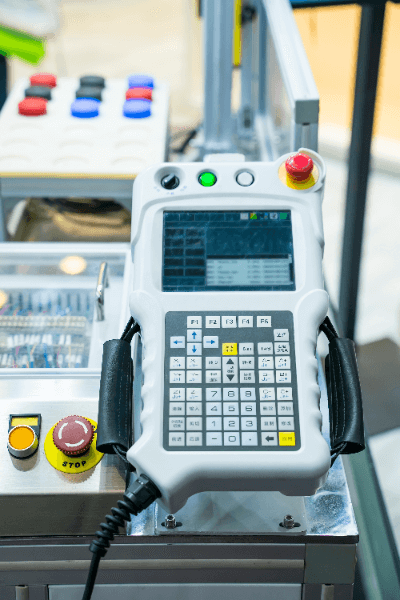
Der Benutzerschnittstellenteil hingegen dient der Bedienung des Roboters durch den Menschen und wird TP (Teaching Pendant) genannt. Die Bedienung des Roboters kann manuell oder durch Programmierung des Roboters erfolgen.
Anwendungen von Robotersteuerungen
Robotersteuerungen werden hauptsächlich zur Steuerung von Roboterarmen verwendet.
Zu den Roboterarmen, die mit Robotersteuerung gesteuert werden können, gehören:
- Vertikal knickgelenkte Roboter
- SCARA-Roboter
- Kooperative Roboter
Diese Roboter führen Aufgaben anstelle von Menschen aus, z. B. Schweißen oder Tragen von Lasten. Die Hauptaufgabe der Robotersteuerung besteht darin, Bewegungsbefehle an den Roboter zu senden. Sie kann auch an den Roboter angeschlossene Peripheriegeräte steuern, z. B. die Endeffektoren (auch als Roboterhände bezeichnet).
Die folgenden Methoden können verwendet werden, um Bewegungsbefehle an den Roboter zu senden:
- Teachen
Die Bewegungen des Roboters werden mit Hilfe von TPs (Teaching) geteacht, um ein Programm zu erstellen, was bei herkömmlichen Industrierobotern weit verbreitet ist. - Kommunikation mit externen Geräten
Die SPS ist mit der Robotersteuerungs-Einheit verbunden, die den Roboter über die SPS und die Robotersteuerungs-Einheit steuert. Der Roboter kann über die Robotersteuerungs-Einheit mit Hilfe von E/A (digitale EIN- oder AUS-Signale) oder Ethernet-Kommunikation gesteuert oder für den Betrieb programmiert werden.
Funktionsweise von Robotersteuerungen
Die Robotersteuerung hat die folgenden Prinzipien und Funktionen:
- Bestimmt die Bewegungen des Roboters
Bestimmt die nächste Bewegung des Roboters als Reaktion auf Befehle von einem übergeordneten Gerät, z. B. einer SPS. - Berechnungen und Befehle
Berechnet die Bewegungen der Motoren in den Gelenken des Roboters und sendet Befehle an die Motoren. - Erkennung von Anomalien
Erkennt Anomalien im Roboter und stoppt ihn.
Einige neuere Produkte sind mit künstlicher Intelligenz ausgestattet, und viele Roboter bestimmen selbst, wie sie sich als nächstes bewegen sollen, ohne dass sie angeleitet werden. Robotersteuerungen für Industrieroboter und Roboter, die mit dem Menschen zusammenarbeiten, werden von den Roboterherstellern angeboten und die Spezifikationen unterscheiden sich von Hersteller zu Hersteller.
Grundsätzlich sind Robotersteuerungen nicht mit anderen Unternehmen kompatibel und eine Robotersteuerung eines bestimmten Herstellers kann keinen Roboter eines anderen Herstellers steuern.
Weitere Informationen zu Robotersteuerungen
1. Arten von TP (Programmierhandgerät)
Es gibt zwei Arten von TP: kabelgebundene und kabellose (z. B. Tablet-Typ).
Kabelgebundene Typen von TP
Kabelgebundene Typen werden häufig für herkömmliche Industrieroboter verwendet. Die Bediener sind daran gewöhnt, sie in Produktionsstätten zu verwenden, in denen bereits Industrieroboter eingesetzt werden, z. B. bei Automobilherstellern.
Ein Nachteil des kabelgebundenen Typs ist, dass es für Anfänger einige Zeit dauern kann, sich mit ihm vertraut zu machen. Um diese Art von Steuerungen verwenden zu können, müssen sich Anfänger durch das Lesen von Handbüchern oder die Teilnahme an Roboterschulungen ein gewisses Maß an Kenntnissen aneignen oder sie müssen einen auf Roboter spezialisierten SIer bitten, ein System für sie zu bauen.
Kabelloser TP-Typ
Der kabellose Typ wird hauptsächlich für von Menschen gesteuerte Roboter verwendet. Ein Vorteil dieses Typs ist, dass er auch für Anfänger relativ einfach zu bedienen ist.
Viele TPs verfügen über einen großen Touchscreen und eine intuitive Bedienung, das so genannte Direct Teaching, so dass auch Anfänger das System schnell bedienen können. Dies ermöglicht es ihnen, den Roboter selbst zu steuern, ohne einen Roboter-SIer zu beauftragen.
Außerdem ermöglicht das Fehlen von dicken Kabeln den Aufbau eines sauberen und aufgeräumten Robotersystems.
2. Entwicklung von Robotersteuerungen
Robotersteuerungen entwickeln sich Tag für Tag weiter, um der Ausweitung der Roboteranwendungen und der steigenden Nachfrage nach Automatisierung gerecht zu werden. In diesem Abschnitt wird die Entwicklung der Robotersteuerungen in Richtung Miniaturisierung und erhöhte Funktionalität beschrieben:
Miniaturisierung
In den letzten Jahren hat die Nachfrage nach kleineren Robotern für Anwendungen wie die Montage elektronischer Bauteile zugenommen. Dementsprechend steigt auch die Nachfrage nach kleineren Robotersteuerungen.
Roboter-Hersteller wie Fujikoshi, Kawasaki Heavy Industries und Yaskawa Electric haben kompakte Robotersteuerungen in der Größenklasse von 12 bis 15 Litern auf den Markt gebracht. Diese Produkte sind um mehr als 70 % kleiner als herkömmliche Modelle.
Erhöhte Funktionalität
Man kann sagen, dass sich die Robotersteuerungen in eine Richtung entwickeln, bei der nicht nur der Roboter, sondern auch die umliegenden Maschinen gemeinsam gesteuert werden. So sind beispielsweise SPS-Funktionen in die Robotersteuerung integriert, wodurch externe Systemsteuerungspanels zur Steuerung von Servomotoren, E/A usw. überflüssig werden.