Was ist ein Palettierroboter?
Ein Palettierroboter ist ein Roboter, der Waren auf Paletten lädt (palettiert). Die Palettierung erfolgt im Wesentlichen automatisch.
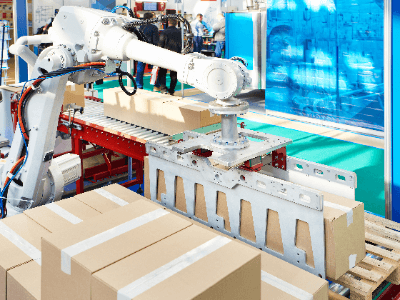
Der Palettierroboter besteht im Wesentlichen aus einem Roboterteil mit sechs Achsen, einer Roboterhand, die die Palette greift, und einem Steuerungsteil, der den Roboter steuert und seinen aktuellen Zustand kontrolliert.
Bei der Einführung eines Palettierroboters müssen Schutzzäune und dergleichen vorgesehen werden, wenn die Größe (Leistung) eine bestimmte Norm überschreitet.
Einsatzmöglichkeiten von Palettierrobotern
Da Palettierroboter für die Beladung von Paletten zuständig sind, können sie in allen Branchen eingesetzt werden, in denen sie arbeiten. Die Greiffähigkeit des Roboters hängt auch davon ab, ob die Form der Hand so vorbereitet werden kann, dass sie die Last greifen kann.
Eine häufige Anwendung ist das Beladen von Kartons. Dies geschieht mit einer Hand, die aus zwei zusammengesteckten Brettern besteht. Auch Kisten mit Oricon und Flaschenbier werden auf ähnliche Weise gegriffen. Auch Behälter wie Eimer werden von oben angesaugt.
Prinzip des Palettierroboters
In diesem Abschnitt werden die Komponenten und Prinzipien des Roboters vorgestellt. Ein Industrieroboter besteht aus einem Manipulator, der die Bewegungen ausführt und die Arbeit erledigt, einer Steuerung, die den Manipulator bewegt und kontrolliert, und einem Programmiergerät, das dem Manipulator beibringt, wie er arbeiten soll. Er setzt sich im Wesentlichen aus diesen drei Elementen zusammen.
Die sechs Achsen des Manipulators werden im Allgemeinen mit AC-Servomotoren gesteuert. Jede der sechs Achsen ist in sechs Teile unterteilt: Körperdrehung, Unterarm zur Hin- und Herbewegung des Körpers, Oberarm zur Auf- und Abwärtsbewegung des Arms, Handgelenksdrehung zur Drehung des Arms und Handgelenksdrehung zur Drehung des Handgelenks.
Palettierroboter können palettieren, indem sie beim Laden von Paletten XYZ-Koordinaten eingeben. Eine andere Methode, die sich in letzter Zeit durchgesetzt hat, ist die Koordinatenerkennung mittels Bilderkennung. Das System nimmt ein Foto von der Oberseite der Palette auf und bestimmt den verfügbaren Platz. Das System bestimmt dann automatisch, wo die Palette geladen werden soll und lädt sie ein. Der Vorteil ist, dass die Koordinaten nicht im Voraus festgelegt werden müssen, der Nachteil ist jedoch, dass die Kosten etwas höher sind.
Die Hände der Palettierroboter
Bei der Palettierung durch den Palettierroboter werden im Grunde jedes Mal die gleichen Waren gegriffen. Und bei den Waren handelt es sich oft um Kartons oder einzelne Kartons oder Pappformen. Je nach Größe des Produkts, wenn es sich um einen Karton oder eine Pappschachtel handelt, wird eine Hand verwendet, die das Produkt von beiden Seiten ergreift. Nachdem die Ware gegriffen wurde, trägt der Palettierroboter die gegriffene Ware und ordnet sie auf einer Palette an. Um zu verhindern, dass die Ware während des Transports durch den Palettierroboter herunterfällt, können am Greifteil der Hand Gabeln angebracht sein, die die Ware nicht nur von beiden Seiten greifen, sondern auch von unten abstützen, um einen stabilen Warentransport zu gewährleisten. Die Kraft, mit der die Ware geklemmt wird, muss unter Berücksichtigung der Empfindlichkeit der Ware und der Fliehkräfte während des Transports bestimmt werden.
Ist das zu greifende Gut hingegen pappenförmig oder sind die einzelnen Kartons oder Pappen zu groß, um von beiden Seiten gegriffen zu werden, wird eine Hand eingesetzt, die das Gut aufnehmen kann. Diese Hände sind mit einem Saugmechanismus ausgestattet und die Waren werden erfasst, indem die Waren mit dem Saugteil in Kontakt gebracht und angesaugt werden. Die Anzahl der Saugteile und der Saugdruck müssen unter Berücksichtigung der Größe und der Empfindlichkeit der Waren festgelegt werden.
Schwierigkeiten bei der Durchführung von Palettiervorgängen mit Robotern
Es ist relativ einfach, ein Palettiersystem mit herkömmlichen Robotern zu realisieren (d. h. Waren an einer festen Position in eine feste Position zu laden).
In den letzten Jahren sind jedoch neue Palettiermethoden erforderlich, wie z. B. die automatische Erkennung von in Stücken gestapelten Waren und deren Verladung in eine feste Position. Bildverarbeitungssysteme sind die Schlüsseltechnologie, um diese Art der Palettierung zu realisieren. Das System nutzt Kameras und 3D-Sensoren, um die Waren zu erkennen, und berechnet mit Hilfe der Bildverarbeitung, wie der Palettierroboter die Waren aufnehmen soll. Der Palettierroboter erhält diese Informationen, ergreift die Ware, transportiert sie zu einer vorgegebenen Position und belädt sie.
Wenn sich diese neue Palettiertechnik durchsetzt, kann sie in der Produktion mit hohen Stückzahlen und geringen Volumina eingesetzt werden, die in Zukunft zum Standard gehören wird, und sie soll die japanische Fertigung modernisieren.