What Is an Evaluation Board?
An evaluation board is an electronic board that contains ICs, circuits with specific functions, and input/output terminals.
They are also called reference boards. There are CPU evaluation boards by semiconductor manufacturers and microcontroller development boards (target boards) by microcontroller manufacturers.
Usage of Evaluation Boards
Evaluation boards are used to check the performance of mounted ICs, circuit compatibility, hardware and software development, and other purposes. It is necessary to select an evaluation board equipped with ICs and electronic components suitable for the intended use.
Examples of evaluation board uses are as follows:
- Equipment manufacturer (evaluation)
To evaluate the performance of mounted ICs and circuits and to check compatibility. - Equipment manufacturer (development)
To develop new products and software in a short time and at a low cost. - Educational institutions, students, and the public
For learning about electronics, electric circuits, programming, etc.
A wide variety of evaluation boards are available from various semiconductor manufacturers. Typical evaluation targets are as follows:
- Automotive systems.
- Video cameras.
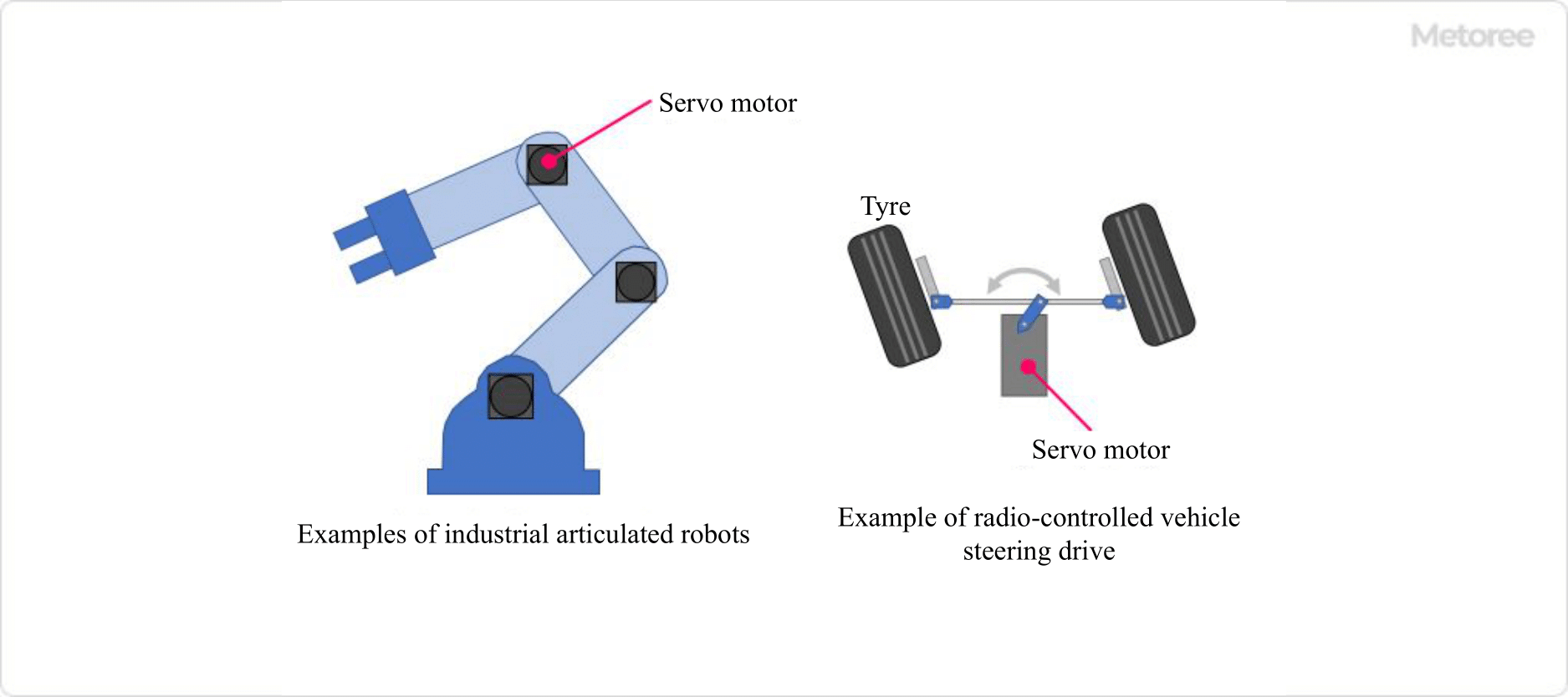
- Industrial robots.
- Terrestrial/satellite communications.
- Mobile communication terminals.
- Aerospace.
Our evaluation boards are used for a wide range of products, from those close to familiar home appliances to those related to robots and satellites.
Principle of Evaluation Boards
The principle of operation is that when power is supplied, the microcontroller operates according to the program written in the memory of the microcontroller. The program can be rewritten arbitrarily, and the source code of the program created on a PC is written into the memory area of the microcontroller using software called a writer.
The hardware used to support the debugging process is an emulator. The emulator is connected to the Evaluation Board.
Evaluation Board Configuration
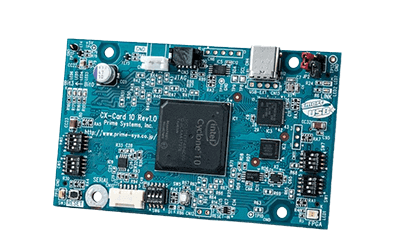
In most cases, an evaluation board consists of IC chips, communication devices, sensors, input/output terminals, etc., on a single printed circuit board. There are various types of evaluation boards depending on the components mounted on them, but microcontroller evaluation boards sold by microcontroller manufacturers are widely used in general.
Microcontroller evaluation boards are used to evaluate and experiment with the functions and circuit characteristics of the microcontrollers on which they are mounted.
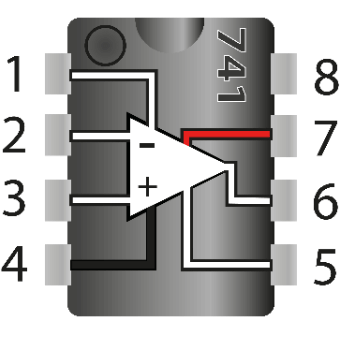
1. Microcontroller
A microcontroller is an LSI that writes programs and combines circuits to perform arbitrary operations. It consists of a CPU that performs various processes and flash memory or SRAM for writing programs.
2. Power Supply IC
An IC that generates the voltage required for a microcontroller to operate from a power supply voltage of 100 VAC.
3. Clock
An oscillator with a specific frequency that operates the microcontroller. It is sometimes built into the microcontroller.
4. Communication Device
A USB terminal or LAN for communication with an external PC for programming.
5. Input/Output Terminals
USB pins for communication/power supply and input/output (I/O) pins for sending data to external interfaces.
Debugging functions include LEDs and a reset button for visual confirmation of the microcontroller status, a switch for switching operations, a sensor for measuring external information, and a 7-segment display for displaying collected data.
Other Information on the Evaluation Board
1. ICE (In-Circuit Emulator)
It can take on the functions of a CPU and can be attached to a board under development in place of a CPU to enable verification of program operation. Since there is no microcontroller on the target board, the ICE itself has an emulation chip and memory, and the target board is responsible for the operation of peripheral circuits. Advanced debugging functions such as real-time trace can be used.
Generally, a sample program for operating a microcontroller Evaluation Board is included.
2. How to Use an Evaluation Board
Evaluation boards are often used by connecting them to a PC for evaluation. The interface is typically USB, RS232C, or other terminals that the PC is equipped with.
The power supply for the board may come with an AC adapter that can be plugged into an ordinary household 100 V outlet. Or, it may be a cable that connects to a power supply unit such as a regulated power supply instead of an AC adapter.
The environment on the PC for evaluation is typically provided by the manufacturer of the evaluation board, using a software package specific to that evaluation board. However, the manufacturer or other party that receives the delivery may prepare its own software for evaluation.
In addition, since waveform measurement is frequently performed using measurement devices such as oscilloscopes and logistic analyzers, some evaluation boards may have terminals for connecting such devices in advance.
The Price of Evaluation Boards
Prices vary widely depending on the semiconductor manufacturer and the purpose of the board.
Note that when a manufacturer orders a full custom-made board for the development of its own products, the cost will depend on the quotation from the semiconductor manufacturer.
 A control relay is a component that receives an electrical signal and outputs a digital signal to control a machine.
A control relay is a component that receives an electrical signal and outputs a digital signal to control a machine.
 Sound level meters are devices that measure environmental noise, and noise emitted by machinery.
Sound level meters are devices that measure environmental noise, and noise emitted by machinery.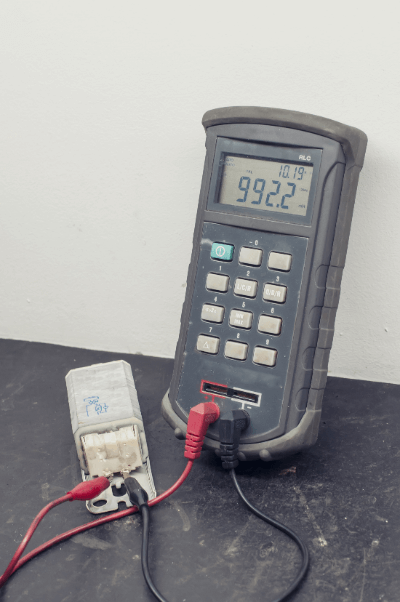 An LCR meter is a device for measuring impedance, where LCR is the symbol for L (inductance), C (capacitance), and R (resistance). Together, these three are called impedance, and an LCR Meter refers to a
An LCR meter is a device for measuring impedance, where LCR is the symbol for L (inductance), C (capacitance), and R (resistance). Together, these three are called impedance, and an LCR Meter refers to a 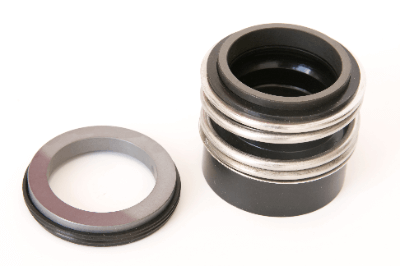 Mechanical seals reduce leakage of liquids from
Mechanical seals reduce leakage of liquids from 
 A temperature controller is a device that controls temperature by comparing the measured temperature with the set temperature.
A temperature controller is a device that controls temperature by comparing the measured temperature with the set temperature.