スカラロボットとは
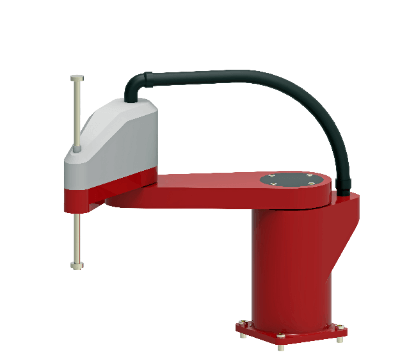
スカラロボットとは、水平方向に動作する回転軸を3軸備え、上下方向に動作する1軸を備えた水平多関節型の産業用ロボットです。
「Selective Compliance Assembly Robot Arm」の頭文字を取って、「SCARA型ロボット」を通称「スカラロボット」と呼びます。
スカラロボットは、次のような特徴を持っています。
- 水平方向の動作を素早く行える
- 比較的安価
- 上下方向の機械的な剛性が高い (回転軸3軸が全て垂直に配置されるため)
このような特徴を活かして、スカラロボットは部品の挿入や配置、ねじ締めなどの組み立て作業の用途で利用され、生産現場の自動化に貢献しています。
スカラロボットの使用用途
スカラロボットは、食品や電子基盤などの製造ラインにおいて使用される場合が多いです。これらの用途以外にも部品などのピック&プレース作業、圧入作業、ディスペンサーを用いた塗布作業、組み立て作業など、様々な用途があります。
1. 食品製造ラインでの使用用途
- ベルトコンベヤで流れてきた食品 (個別包装されたお菓子など) をプラスチック製のトレーに詰める作業
- レトルトパックされた食品を発送用のケースに詰める作業
2. 電子基板製造ラインでの使用用途
- バラ積みされた部品をパーツフィーダで整列させた後に、トレー上に部品をピック&プレースする作業
- トレー上の電子部品 (コネクタなど) を、電子基板上に配置する作業
- 組立済の電子基板を検査機にセットし、検査後の基板を次の工程にセットする作業
3. その他の使用用途
- ネジ締め:ロボット先端の電動ドライバーで複数個所のネジ締めをする作業
- 段ボール開梱:テープを切って段ボールを空ける作業
- ラベル貼り付け:ロボット先端に専用のラベル貼り付け用のハンドを取り付ける作業
スカラロボットの原理
スカラロボットは、基本的に3軸の回転動作と1軸の上下動作の合計4軸の動作軸によって構成されています。3軸の回転軸は全てアーム先端部を水平移動させるために用いられています。このような構成から、スカラロボットは水平方向の動作に特化したロボットと言えるでしょう。
3軸の回転軸によってロボット先端を水平方向に移動し、ワークの真上に高速移動させ、続いて上下軸を用いてロボット先端部をワークに真上からアプローチします。それから、ワークをつかむなどの作業を行います。
スカラロボットのアーム先端は、作業に応じて次のようなツールを装着することができます。
- エアー吸着パッド
- 空気圧グリッパ
- 電動グリッパ
- ネジ締め機器
- ディスペンサー
スカラロボットを動かすためには動作を教示 (ティーチング) する必要があります。これまではティーチングペンダントと呼ばれる専用ツールを用いるのが一般的でした。近年では、パソコン上でティーチングができる機種や、ダイレクトティーチングと呼ばれる初心者でも簡単にティーチングができる機種もあり、使いやすさを重視したスカラロボットも増えています。
スカラロボットのその他情報
1. 高速スカラロボット
スカラロボットには高速動作を目的とした製品も存在します。ロボットが高速で動作することで、ライン全体の生産性向上に貢献します。
スカラロボットが早く作業を終えられれば、後工程により早くワークを受け渡すことが可能です。その結果、1つの製品を生産する時間が短くなります。これが、スカラロボットの高速化によってライン全体の生産性が向上する理由です。
高速動作可能なスカラロボットを実現するためには、次のような手段が有効です。
- モーターの出力を大きくする
- アームを軽量化する
- 関節の剛性を上げる
- ロボットの振動を抑える制御をする
2. カメラを利用したスカラロボット
カメラから得られる情報をスカラロボットに送信することで、ロボット自体の性能を上げることができます。スカラロボットでワークに対してネジ締めを行う場合を考えます。ワークは個々に交差を持っており、厳密に言えばそれぞれ微妙に大きさが異なります。
従って、ネジを保持したスカラロボットが教示位置に移動しても、ワーク上のねじ穴とスカラロボット先端のネジ先のポジションが合わない状況が発生しうるのです。このような状況では、多くの場合ネジ締めに失敗します。
ここで、カメラを用いてねじ穴を撮影し、基準位置に対するズレ量を計算します。そしてそのズレ量をスカラロボットに送信し、元々の教示点にオフセットさせることで位置を補正します。
これによって、カメラの撮像範囲内であればどの位置にネジ穴があってもスカラロボットがネジ締め作業をすることが可能になります。このような仕組みは、「画像位置補正」と呼ばれ、工場の自動化に広く利用されています。
参考文献
https://www.pref.mie.lg.jp/common/content/000171768.pdf
http://www.mech.tohoku-gakuin.ac.jp/rde/contents/sendai/mechatro/archive/RMSeminar_No18.pdf
https://www.denso-wave.com/ja/robot/info/detail__917.html