人工筋肉とは
柔軟な素材が外部からのエネルギーを受けることによって変形し力を発生させるソフトアクチュエータは「人工筋肉」とも呼ばれ、従来のアクチュエータで主に利用されていた産業用ロボット用途を超えて、医療機器、マイクロマシン、ヒューマノイドロボット、ウェアラブル機器など、人に近い場面での活用が期待されています。
人工筋肉には高分子型アクチュエータのように電気、磁気、化学的なエネルギーを与えて変形するタイプ、空気圧人工筋肉のように空気圧や油圧などの流体圧を与えて変形するタイプなど、入力するエネルギーによってさまざまなタイプがあります。ここでは空気圧を印加すると収縮する空気圧人工筋肉について解説します。
空気圧人工筋肉
空気圧人工筋肉は、空気圧を印加することによって収縮するチューブ状の人工筋肉です。
空気という圧縮性流体を用いるため適度なばね性を持ち、自重に対して高い出力が得られることが特長です。
チューブ状の空気圧人工筋肉の代表格はMcKibben(マッキベン)型人工筋肉で、古くから研究が進められておりましたが、ウェアラブル機器、ソフトロボットの発展とともに再注目を浴びています。
マッキベン型人工筋肉は、ゴムチューブとその外周に編んだ組紐で構成され、ゴムチューブに空気圧を印加すると、組紐の内側にあるゴムチューブが膨張します。ゴムチューブの径方向の膨張によって、下図のように網目の角度が変化し、軸方向に収縮する力を生み出します。
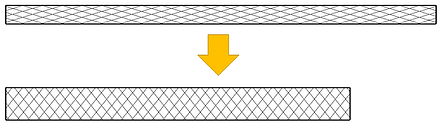 組紐の網目の角度の変化により空気圧人工筋肉が収縮する様子
組紐の網目の角度の変化により空気圧人工筋肉が収縮する様子
マッキベン型人工筋肉の場合、印加圧力は通常約100~700kPa(G)で、印加する圧力を高めるほど収縮量は増大し、最大収縮力も高まります。
収縮量は初期の長さから最大で20%程度、発生する収縮力は空気圧人工筋肉の径、印加圧力に応じて制御することが可能です。
空気圧人工筋肉の用途
軽量で高出力を得られる空気圧人工筋肉は、ウェアラブル機器やソフトロボットへ応用が期待されており、アシストスーツのアシスト力として空気圧人工筋肉を利用する事例も増加傾向にあります。
その一方で、空気圧人工筋肉は、印加圧力を高めると柔軟性が失われてしまう特徴があり、例えばウェアラブル機器のように人体などの動きに追従させたい場合、高出力と柔軟性の両立が難しいといった課題もあります。
近年では細径の空気圧人工筋肉の登場によって、これらを並列で使用することにより、空気圧人工筋肉の持つ柔軟性を失わずに大きな収縮力を得られるようになってきました。※1)
また、空気圧人工筋肉の自動制御に向けて、空気圧人工筋肉の収縮をプログラム制御する専用コントローラ※2)なども上市されるなど、空気圧人工筋肉の本格的な社会実装に向けた取り組みが加速しています。