What Is a Bipolar Transistor?
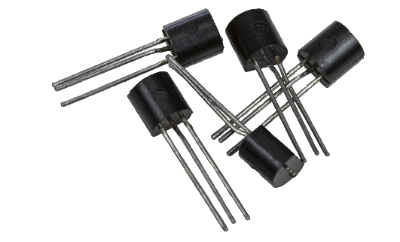
A bipolar transistor is a three-terminal semiconductor device.
Also called a junction transistor, it consists of N-type and P-type semiconductors in a P-N-P or N-P-N junction structure. Unlike field effect transistors (FETs), which are unipolar transistors in which either holes or free electrons act as carriers, bipolar transistors are called bipolar because both holes and free electrons are involved in their operation.
Applications of Bipolar Transistors
The two main functions of bipolar transistors are amplification and switching.
In amplification circuits that turn minute signals into sufficiently large levels, bipolar transistors are more advantageous than unipolar transistors, especially when a high amplification factor is required. Bipolar transistors are also superior in operating at high frequencies.
For example, in power supply regulator circuits where switching noise with high-frequency components must be suppressed, there is a marked difference in noise rejection ratio and other characteristics between circuits using bipolar transistors and those using FETs.
Bipolar transistors are still used in small-lot production and high-frequency amplification circuits that are difficult to make into ICs, but because they are current-driven, they consume more power than unipolar transistors, which are voltage-driven. However, because they are current-driven, they consume more power than voltage-driven unipolar transistors.
On the other hand, switching circuits are used for ON/OFF control of current, but unipolar transistors are superior in terms of switching speed and miniaturization, so they are rarely used for this purpose.
Principles of Bipolar Transistors
Semiconductors can be classified into P-type and N-type semiconductors: P-type semiconductors are filled with holes, which are missing electrons; N-type semiconductors are filled with free electrons, which are in surplus.
Transistors are a combination of P- and N-type semiconductors. In the case of bipolar transistors, there are two types of transistors: one consisting of three regions: P-type, N-type, and P-type, and the other consisting of three regions: N-type, P-type, and N-type.
The former is called a PNP transistor and the latter an NPN transistor; the three regions are the emitter, base, and collector, each of which is connected to an electrode through which voltage is applied and a signal current flows. The base is characterized by being extremely thin.
The principle of operation of a bipolar transistor is explained using the example of an NPN-type transistor, which has an N-type semiconductor sandwiched between a P-type semiconductor.
With the emitter connected to the reference voltage (0V) and the collector connected to VCC (e.g. +5V), when a positive voltage is applied to the base and a base current Ib flows to the emitter, a current Ic of β × Ib flows from the collector to the emitter. This is the principle of amplification by a transistor, which is based on current amplification in bipolar transistors. β is called the current amplification factor and is usually around 100~200. In PNP transistors, the direction of the applied voltage and current is opposite, but the principle of amplification is the same.
In switching operation, a large base current Ib allows sufficient current to flow to the load connected to the collector. Also, if the base current is set to 0A, no current flows to the load. By flowing/not flowing the base current Ib, the current flowing to the load is turned ON/OFF and the switching operation is realized.
Other Information on Bipolar Transistors
Type Names of Bipolar Transistors
Before 1993, the JIS standard stipulated how to name semiconductor components. Therefore, the application of a transistor can be determined to some extent from its type name. For Bipolar Transistors, the first three letters are as follows
- 2SA: PNP type transistor for high frequency
- 2SB: PNP type transistor for low frequency
- 2SC: NPN type transistor for high frequency
- 2SD: NPN type transistor for low frequency
The actual type name, for example, 2SA372Y, is composed of three letters followed by a number and an alphabet. The numbers start with 11 and consist of 2 to 4 digits, but they are assigned in the order of registration and have no meaning. The last alphabet means the rank classification of the amplification ratio.
This JIS standard was abolished in 1993 but has continued to be used in the standard “Type Names of Individual Semiconductor Devices” issued by the Japan Electronics and Information Technology Industries Association (JEITA), which succeeded it.
 A rotary encoder is a device that measures the amount of movement or angle of rotation of an object to be measured.
A rotary encoder is a device that measures the amount of movement or angle of rotation of an object to be measured.