What Is an AC Servo Motor?
An AC servo motor is an actuator that converts electrical signals into physical motion. The servo in a servo motor means to move faithfully and as commanded.
The motor is designed to achieve accurate rotational position, speed, and force through electrical control.
There are three types of motors: DC motors, AC motors, and pulse motors, AC servo motor is classified as AC motors. Most of the motors currently used in the factory automation (FA) field are AC servo motor motors.
Uses of AC Servo Motors
AC servo motors are used when physical work is required in automation systems. They are especially used in the production of industrial products that require a high degree of precision.
For example, industrial robots used in automobile manufacturing plants use AC servo motors as moving parts to perform welding and painting operations.
Other applications include semiconductor and LCD manufacturing equipment, electronic component mounting, and LED manufacturing, where AC servomotors contribute to high productivity and high-precision positioning. In familiar situations, they are also used in platform doors at railroad stations and moving parts of medical equipment.
Principle of AC Servo Motors
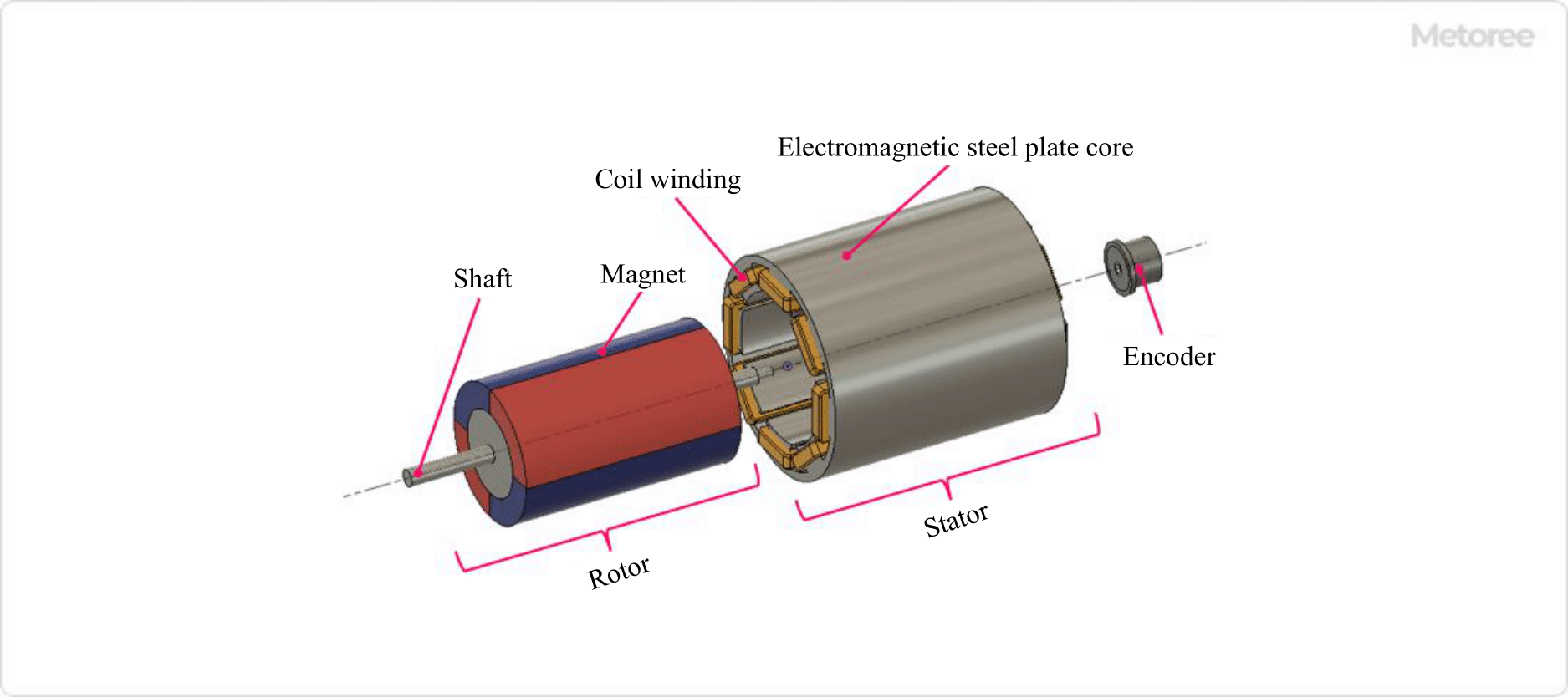
Figure 1. Structure of AC servo motor
The rotor, the rotating part of the motor, is made of permanent magnets and is connected to a shaft and a rotation detector (encoder).
Surrounding the rotor is the stator, which consists of an iron core with wires wound around it. The motor is driven by applying the appropriate current to these wires.
In actual operation, the servo controller first sends a command signal to the servo amplifier, which is the control unit. The accuracy of the AC servo motors is achieved by a detector on the motor that detects movement and sends a feedback signal to the servo amplifier. By comparing the signal from the controller with the feedback signal, the servo amplifier supports the accurate operation of the motor.
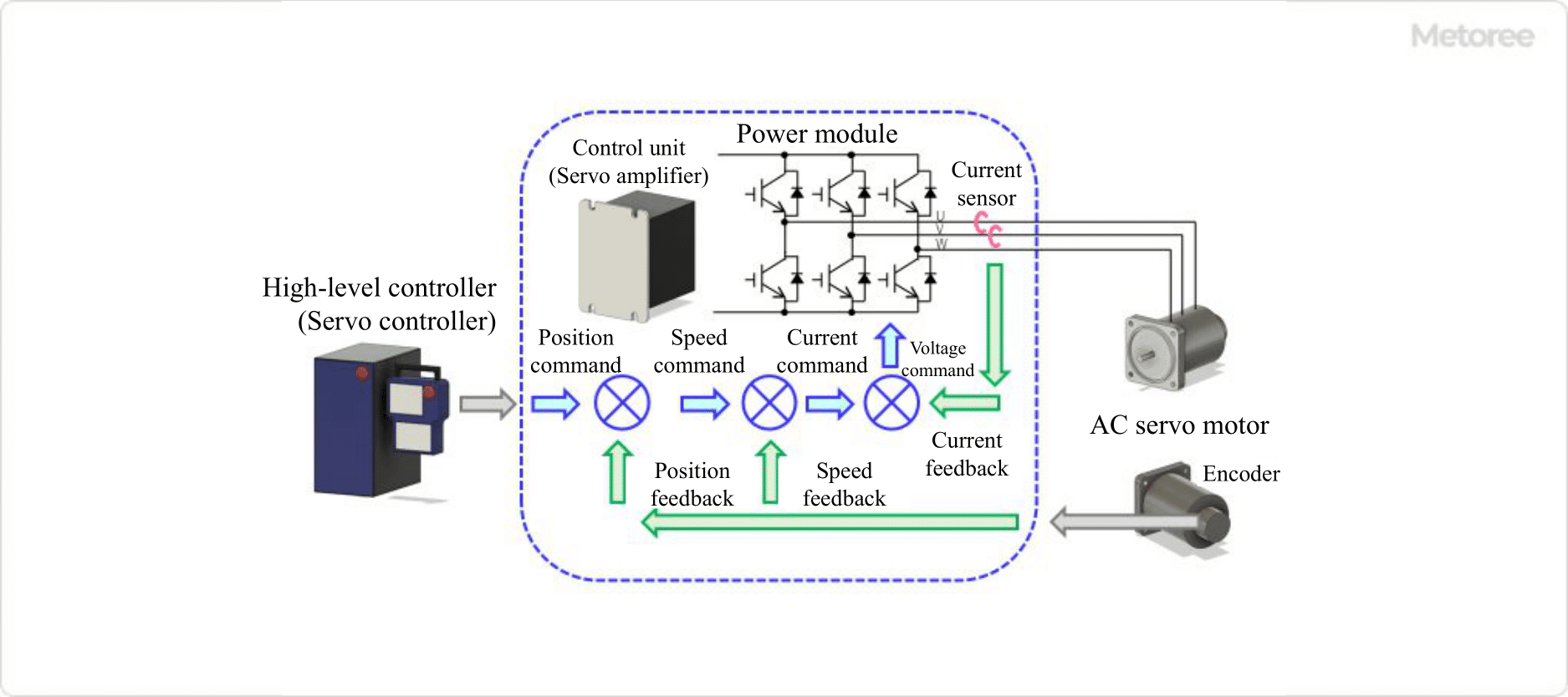
Figure 2. Control of AC servo motor
Other AC Servo Motors Information
1. AC Servo Motors and Stepping Motors
There are various types of motors, and different types of motors need to be used for different applications and conditions. This section describes the features of AC servo motors and stepping motors, which are commonly used for industrial applications.
Both types of motors are capable of high-precision positioning control, but each has its characteristics in terms of structure and principle of operation.
Stepping motors
Stepping motors, also known as pulse motors, are motors that move by step angles in response to pulse signals.
Since the rotation angle is determined by the number of pulses, accurate positioning is possible. Rotation speed is proportional to the speed of the pulse signal. Because they are compact and generate high torque, they excel in acceleration and responsiveness, making them suitable for applications that require frequent repetition of start and stop operations.
- Minimum step angle is about 0.72° in rotation angle (1/5,000@1 rotation)
- Control is an open loop, and if a step-out occurs, it will not return to the original position.
AC servomotors
AC servomotors are equipped with an encoder, a device that detects rotational speed and position, which is fed back to the motor’s rotational control for accurate positioning.
Servo motors have stable torque characteristics from low to high-speed ranges, making them suitable for applications that require high-speed movement over relatively long distances.
2. Brakes for AC Servo Motors
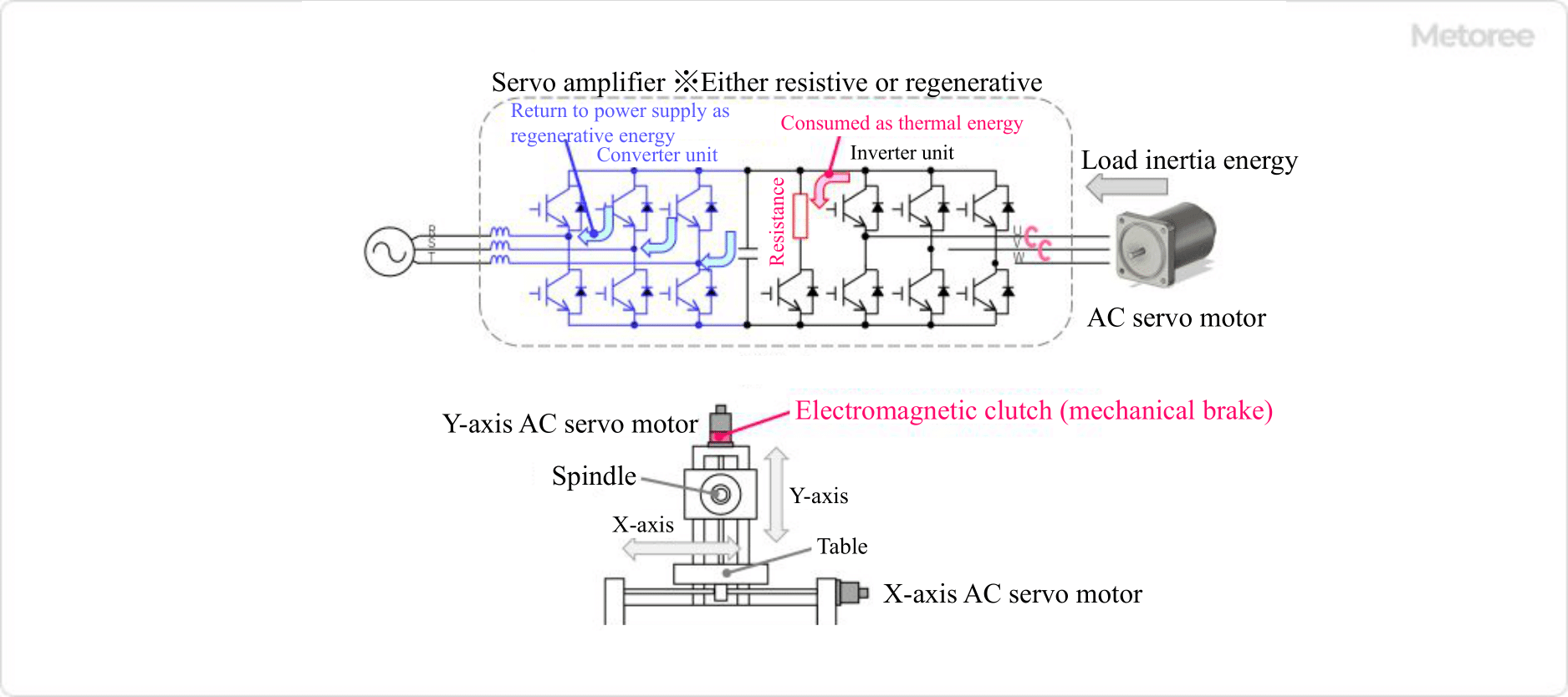
Figure 3. Brake mechanism for AC servo motor
To ensure the safety of industrial equipment such as drives that use AC motors, two main types of brakes can be used to stop the motor in an emergency when the power supply is cut off, or a failure occurs.
Brake for braking
One is called a braking brake, in which a large load moment of inertia is either consumed thermally by a resistor or fed back to a servo amplifier as regenerative energy to be reused as electrical energy.
Mechanical brakes
The method that consumes heat is called a dynamic brake, and the method that reuses it as electrical energy is sometimes called a regenerative brake. Both are only for deceleration and have no holding function.
To prevent a vertical drive system from falling in the event of a power failure, etc., it is necessary to keep the system at a standstill for a long period, and a holding brake or electromagnetic brake is used for this purpose.
A non-excitation actuated electromagnetic brake is used to apply the brake when the power is cut off and maintain the stopped state.