¿Qué es un Robot de Soldadura?
Un robot de soldadura es un dispositivo en el que se acopla un soldador a un robot para realizar soldaduras automáticas.
El uso de un brazo robótico o similar permite soldar en espacios más estrechos que con los equipos de soldadura automatizados convencionales, como las montadoras y los equipos de soldadura. Tradicionalmente, la soldadura en espacios reducidos sólo podía ser realizada manualmente por humanos.
Usos de los Robots de Soldadura
Los robots de soldadura se utilizan para soldar, pero son más adecuados para fabricar pequeñas cantidades de una amplia variedad de productos que para artículos producidos en serie. También son buenos en trabajos detallados y precisos que tradicionalmente han sido realizados manualmente por humanos, como la soldadura localizada y la soldadura en piezas con bajas temperaturas de resistencia al calor. Sin embargo, esto significa que el trabajo lleva más tiempo que con otros sistemas de soldadura automatizados.
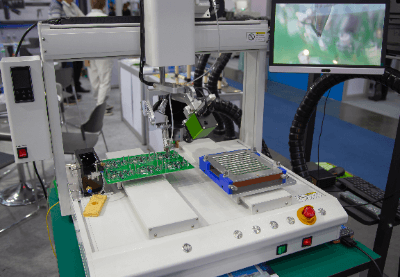
Por ejemplo, la soldadura de la placa amplificadora del sensor de fibra inteligente se realiza mediante el método de soldadura por deslizamiento con la introducción del robot de soldadura. El robot se encarga de soldar en zonas precisas con una anchura de terreno de 0,5 mm y un paso de 1 mm, mejorando así la eficiencia del trabajo.
Principios de los Robots de Soldadura
Los robots de soldadura constan de un robot con un brazo, un soldador, un controlador y una consola didáctica para ajustar las condiciones. Algunos están equipados con un generador de gas nitrógeno para evitar la oxidación de la punta del soldador y la superficie de la soldadura.
Los tipos de robot incluyen pequeños robots de sobremesa, así como robots SCARA y cartesianos, dependiendo del estilo del brazo robótico. Pueden utilizarse introduciendo las condiciones de soldadura desde un mando didáctico y haciendo que realicen la soldadura prescrita.
Tipos de Robot de Soldadura
Los robots de soldadura incluyen los robots de sobremesa, los robots SCARA y los robots cartesianos. Otros tipos se clasifican según el método de soldadura. Los métodos de soldadura más comunes son el método de hierro y el método láser. El método de hierro sigue siendo muy utilizado en la actualidad.
1. Método del Hierro
En el método del soldador de hierro, el soldador se calienta a casi 350 °C y la soldadura se vierte desde la punta del soldador para unir el metal. En comparación con el método de soldadura por reflujo, en el que se aplica soldadura en crema y después se calienta y funde, el método del soldador de hierro se caracteriza por el hecho de que el calor no se aplica directamente a los componentes electrónicos. Esto significa que se minimizan los daños térmicos y se puede conseguir una soldadura de alta calidad.
2. Proceso Láser
En el proceso láser, la soldadura se funde mediante un rayo láser. Este método aprovecha el hecho de que un rayo láser puede enfocarse mediante una lente o un espejo para formar un haz de alta densidad, que calienta el objeto a una temperatura elevada. Los componentes y la soldadura se colocan en la zona donde el diámetro del rayo láser incide sobre el objeto y se sueldan. Este proceso láser es adecuado para el procesamiento estrecho y fino debido a la naturaleza sin contacto del proceso de soldadura.
Más Información sobre los Robots de Soldadura
1. Ventajas de Instalar un Robot de Soldadura
Las ventajas de introducir un robot de soldadura son que automatiza y acelera el trabajo y aumenta la precisión del mismo. Una buena soldadura depende de factores como la temperatura del soldador, el tiempo de contacto y el área de contacto con la placa.
Si estos factores no se controlan adecuadamente, puede producirse fundido de la soldadura debido a una temperatura demasiado baja o a un tiempo de contacto demasiado corto. La soldadura de imitación da lugar a una unión débil y quebradiza. Lo mismo ocurre con la soldadura quemada, que se produce por una conducción insuficiente del calor. Esta situación es especialmente probable en lugares donde hay muchos novatos sin experiencia, lo que aumenta la tasa de rechazo y reduce la eficacia de la producción.
En estos casos, resulta eficaz introducir un Robot de soldadura en la obra para que realice las mismas tareas que un experto. La mayoría de los Robots de soldadura son capaces de controlar el posicionamiento en incrementos de 0,1 mm y tienen una alta repetibilidad posicional (precisión de trabajo). Además, es posible el funcionamiento a alta velocidad accionado por motor, que es más rápido que el funcionamiento humano y evita los errores humanos debidos a la fatiga, etc.
2. Sistematización del Robot de Soldadura
La mayoría de los robots de soldadura pueden sistematizarse con relativa facilidad. Normalmente, se requiere un complejo trabajo de programación cuando los robots se integran en líneas de producción. Por ejemplo, en el caso de los robots articulados verticalmente, es necesario programar e introducir las “tareas que debe realizar el robot” mediante un lenguaje especializado para robots.
Sin embargo, si la tarea que debe realizar el robot ya está decidida, como en el caso de los robot de soldadura, la programación suele correr a cargo del desarrollador del robot. Así, el usuario sólo tiene que configurar parámetros como la información sobre la posición de soldadura y el tiempo de calentamiento tras la instalación, y el robot puede integrarse en la línea de producción.

 Los servomotores pequeños son motores capaces de controlar el posicionamiento y la velocidad con gran precisión.
Los servomotores pequeños son motores capaces de controlar el posicionamiento y la velocidad con gran precisión. Los diodos de señal pequeña son diodos que funcionan con corrientes relativamente pequeñas, de unos cientos de mA o menos.
Los diodos de señal pequeña son diodos que funcionan con corrientes relativamente pequeñas, de unos cientos de mA o menos. Los sistemas de exposición de semiconductores se utilizan para representar patrones de circuitos en obleas de silicio en el proceso de fabricación de semiconductores. Se transmite una potente luz ultravioleta a través de una fotomáscara, que sirve de prototipo para el patrón del circuito, y el patrón del circuito se transfiere a la oblea de silicio recubierta con fotorresistencia. En los últimos años, algunos equipos utilizan un láser con una longitud de onda de 13 nm, conocido como EUV, para miniaturizar patrones de circuitos finos. Los equipos son caros porque requieren una precisión extremadamente alta en el posicionamiento, etc.
Los sistemas de exposición de semiconductores se utilizan para representar patrones de circuitos en obleas de silicio en el proceso de fabricación de semiconductores. Se transmite una potente luz ultravioleta a través de una fotomáscara, que sirve de prototipo para el patrón del circuito, y el patrón del circuito se transfiere a la oblea de silicio recubierta con fotorresistencia. En los últimos años, algunos equipos utilizan un láser con una longitud de onda de 13 nm, conocido como EUV, para miniaturizar patrones de circuitos finos. Los equipos son caros porque requieren una precisión extremadamente alta en el posicionamiento, etc.