Qu’est-ce que le bus CAN ?
 Le bus CAN signifie “Controller Area Network”, ou réseau de contrôleurs, et fait référence à un protocole de communication série développé par Bosch en Allemagne.
Le bus CAN signifie “Controller Area Network”, ou réseau de contrôleurs, et fait référence à un protocole de communication série développé par Bosch en Allemagne.
Le protocole de communication bus CAN a été achevé en 1985. Bien que ce protocole de communication soit largement utilisé dans l’industrie automobile, il n’a été adopté pour les véhicules de série qu’en 1990. Il a ensuite été défini comme norme par l’Organisation internationale de normalisation.
Le bus CAN est une technologie largement utilisée non seulement dans l’industrie automobile, mais aussi dans le domaine de l’automatisation des usines (FA).
Utilisations du bus CAN
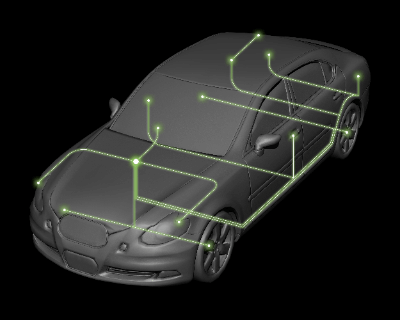
Le protocole de communication bus CAN a été développé pour être utilisé dans l’industrie automobile. La principale application est la communication entre les unités de contrôle électronique (ECU).
Les véhicules modernes étant contrôlés électroniquement, chaque dispositif doit pouvoir communiquer avec précision à grande vitesse. La communication par bus CAN est conçue de manière à ce que les dispositifs puissent communiquer entre eux sans avoir besoin d’un ordinateur hôte, et elle est également très résistante au bruit. Il peut donc être considéré comme une technologie de communication fiable et un protocole de communication indispensable pour les véhicules.
Caractéristiques du bus CAN
Le bus CAN a été développé en tant que protocole de communication pour les calculateurs automobiles et présente donc un certain nombre de caractéristiques.
Au fil des ans, les voitures sont devenues plus sophistiquées et les détails de contrôle sont devenus plus complexes. Plus le contenu de la commande est complexe, plus il y a d’entrées et de sorties dans l’ECU, et plus il faut de câblage pour échanger des données entre les ECU. Il en résulte des calculateurs plus volumineux, plus lourds et plus nombreux, et des coûts de production plus élevés.
Pour résoudre ce problème, il fallait une technologie de communication à grande vitesse et très fiable, avec moins de câblage. C’est ainsi qu’est né le protocole de communication bus CAN.
Le protocole de communication bus CAN, qui a vu le jour dans le contexte susmentionné, présente les caractéristiques suivantes :
- Connexion entre les calculateurs avec moins de harnais.
- Grande évolutivité.
- Communication aisée d’ECU à ECU.
- Un seul élément d’information peut être partagé par plusieurs calculateurs.
- Le diagnostic des pannes et le traitement de l’ensemble du réseau peuvent être effectués en un seul endroit.
Ces caractéristiques exceptionnelles du protocole de communication bus CAN ont permis des percées dans le domaine de plus en plus complexe du contrôle des véhicules. Elles ont contribué de manière significative à l’amélioration de la fonctionnalité des véhicules dans le monde entier.